
Hi,
I have a custom board similar to the thingy91.
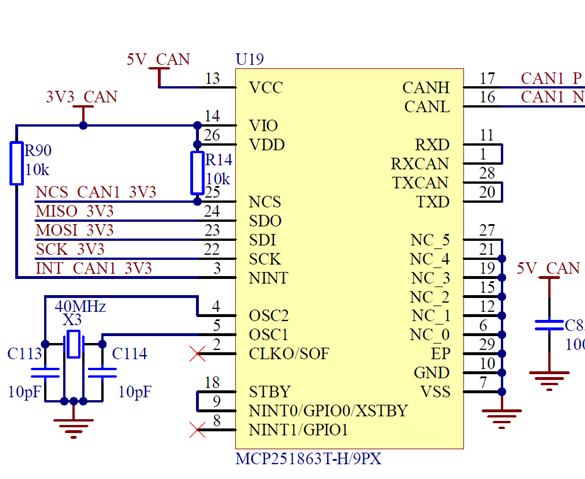
I use two MCP251863 (same as MCP2518FD with an integrated tranceiver) on the spi3.
schematic
device tree
/ {
model = "custom thingy nRF9160";
compatible = "nordic,asl01-nrf9160";
chosen {
zephyr,console = &uart0;
zephyr,shell-uart = &uart0;
zephyr,uart-mcumgr = &uart0;
zephyr,canbus = &can1;
};
buttons {
compatible = "gpio-keys";
button0: button_0 {
gpios = <&gpio0 26 (GPIO_PULL_UP | GPIO_ACTIVE_LOW)>;
label = "Button 1";
};
};
leds {
compatible = "gpio-leds";
red_led: led_1 {
gpios = <&gpio0 13 0>;
label = "RGB red channel";
};
green_led: led_2 {
gpios = <&gpio0 9 0>;
label = "RGB green channel";
};
blue_led: led_3 {
gpios = <&gpio0 14 0>;
label = "RGB blue channel";
};
};
pwmleds {
compatible = "pwm-leds";
pwm_led0: pwm_led_0 {
pwms = <&pwm0 0 PWM_MSEC(8) PWM_POLARITY_NORMAL>;
};
pwm_led1: pwm_led_1 {
pwms = <&pwm0 1 PWM_MSEC(8) PWM_POLARITY_NORMAL>;
};
pwm_led2: pwm_led_2 {
pwms = <&pwm0 2 PWM_MSEC(8) PWM_POLARITY_NORMAL>;
};
};
nrf52840_reset: gpio-reset {
compatible = "nordic,asl01-nrf52840-reset";
status = "okay";
gpios = <&gpio0 10 GPIO_ACTIVE_LOW>;
};
aliases {
sw0 = &button0;
led0 = &red_led;
led1 = &green_led;
led2 = &blue_led;
pwm-led0 = &pwm_led0;
pwm-led1 = &pwm_led1;
pwm-led2 = &pwm_led2;
rgb-pwm = &pwm0;
mcuboot-button0 = &button0;
mcuboot-led0 = &blue_led;
};
};
&adc {
status = "okay";
};
&gpiote {
status = "okay";
};
&gpio0 {
status = "okay";
};
/* PWM0 is intended for RGB LED control */
&pwm0 {
status = "okay";
pinctrl-0 = <&pwm0_default>;
pinctrl-1 = <&pwm0_sleep>;
pinctrl-names = "default", "sleep";
};
&spi3 {
compatible = "nordic,nrf-spim";
status = "okay";
cs-gpios = <&gpio0 0 GPIO_ACTIVE_LOW>;
pinctrl-0 = <&spi3_default>;
pinctrl-1 = <&spi3_sleep>;
pinctrl-names = "default", "sleep";
can1: mcp251xfd@0 {
compatible = "microchip,mcp251xfd";
status = "okay";
spi-max-frequency = <18000000>;
int-gpios = <&gpio0 31 GPIO_ACTIVE_LOW>;
reg = <0x0>;
osc-freq = <40000000>;
bus-speed-data = <1000000>;
bus-speed = <500000>; // 500Kbits/s
sample-point = <875>;
sample-point-data = <875>;
};
};
prj.conf
CONFIG_SPI=y CONFIG_CAN=y CONFIG_CAN_FD_MODE=y CONFIG_CAN_MCP251XFD=y
Q1: how to add both MCP to my device tree ?
Q2: do I add the tranceiver to the device tree, if yes, how to do so ?
Q3: how to enable disble the tranceiver ?
thanks for your time,
