
Hello
As the title says, I am suspending the UART using PM_DEVICE ACTION_SUSPEND, but the power consumption is not decreasing significantly.
With CONFIG_SERIAL=n and no UART used, power consumption is now around 20uA.
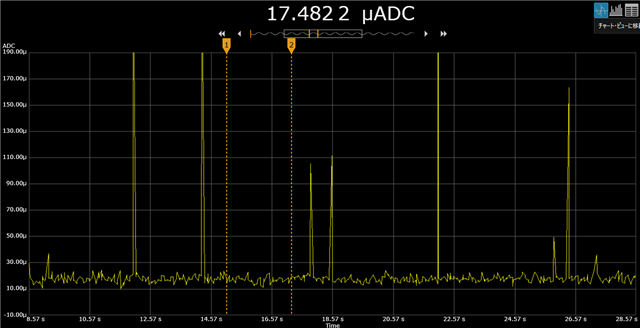
When using pm_device_action_run, the power consumption was about 1.3mA.
Please tell me the correct way to stop UART.
SDK : nrf Connect SDK 2.6.1
Board : Raytac MDBT42Q-DB

#include <zephyr/kernel.h>
#include <zephyr/pm/device.h>
#include <zephyr/logging/log.h>
#include <zephyr/device.h>
#include <zephyr/devicetree.h>
#include <zephyr/drivers/uart.h>
LOG_MODULE_REGISTER(main, LOG_LEVEL_INF);
static uint8_t Buffer[16];
static const struct device *Uart = DEVICE_DT_GET(DT_NODELABEL(uart0));
static void Callback(const struct device *dev, struct uart_event *evt, void *user_data);
int main(void)
{
#if defined(CONFIG_SERIAL)
if (!device_is_ready(Uart))
{
LOG_ERR("device is not ready");
return 0;
}
const struct uart_config cfg = {
.baudrate = 1000000,
.parity = UART_CFG_PARITY_NONE,
.stop_bits = UART_CFG_STOP_BITS_1,
.data_bits = UART_CFG_DATA_BITS_8,
.flow_ctrl = UART_CFG_FLOW_CTRL_RTS_CTS,
};
int err = uart_configure(Uart, &cfg);
if (err)
{
LOG_ERR("uart_configure (%d)", err);
return 0;
}
err = uart_callback_set(Uart, Callback, NULL);
if (err)
{
LOG_ERR("uart_callback_set (%d)", err);
return 0;
}
err = uart_rx_enable(Uart, Buffer, sizeof(Buffer), 1000);
if (err)
{
LOG_ERR("uart_rx_enable (%d)", err);
return err;
}
int count = 0;
while (count < 10)
{
k_msleep(1000);
LOG_INF(".");
count++;
}
err = pm_device_action_run(Uart, PM_DEVICE_ACTION_SUSPEND);
if (err)
{
LOG_ERR("pm_device_action_run (%d)", err);
return 0;
}
else
{
LOG_INF("SUSPEND");
}
#endif
while(true)
{
k_msleep(1000);
LOG_INF(".");
}
return 0;
}
static void Callback(const struct device *dev, struct uart_event *evt, void *user_data)
{
switch (evt->type)
{
case UART_TX_DONE:
break;
case UART_TX_ABORTED:
break;
case UART_RX_RDY:
break;
case UART_RX_BUF_REQUEST:
break;
case UART_RX_BUF_RELEASED:
break;
case UART_RX_DISABLED:
break;
case UART_RX_STOPPED:
break;
default:
break;
}
}

