Interfacing mpu6050 with 52832 DK worked fine .
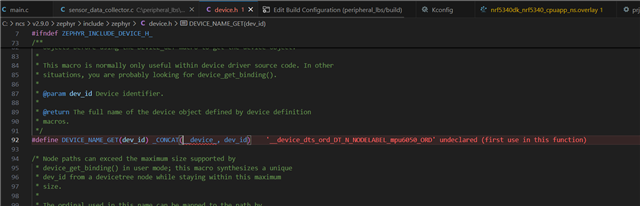
But when I used same sample code for 5340DK it produced errors .I configured device overlay file as below and build configuration accordingly . What are the other changes I should make.i found there is a problem with device overlay file, that didn't interface sensor (MPU6050) properly with nrf5340DK ,Help me in rectifying it.
&i2c0 {
status = "okay";
mpu6050: mpu6050@68 {
compatible = "invensense,mpu6050";
status = "okay";
reg = <0x68>;
};
};