Hello!
I was wondering if there is any advice from trying to get Non-simultaneous firmware updates using sysbuild with the following constraints:
- Must update both App Core and Netcore
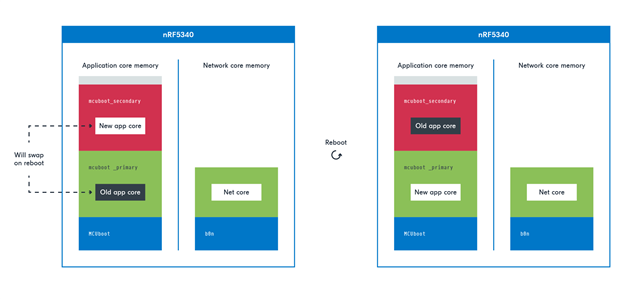
- Non-Simultaneous preferably
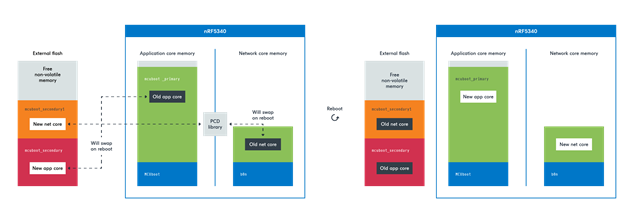
- Without External flash
- Custom board
- Custom Netcore (DTM/In-house Manufacturing)
- Using sysbuild (because we were advised to move to 2.8.0 and sysbuild is now a must)
- Using SMP
During our development we got this working on ncs 2.6.X, and we can do all the above without sysbuild, we wrote our own SMP transport and we can do the updates, and we've seen that there is still ongoing DFU development for sysbuild in ncs2.7.0+ and we are wondering if there are any updates on this?
Most of the samples we've seen cover the simultaneous and with external flash, but not the non-simultaneous without external flash, we could potentially do simultaneous, but the external flash is not something we can add at this point.
To clarify we want this to be able to go from our DTM/Manufacturing image to the Customer/production image (both with different App/Net Core images) using our SMP Transport.
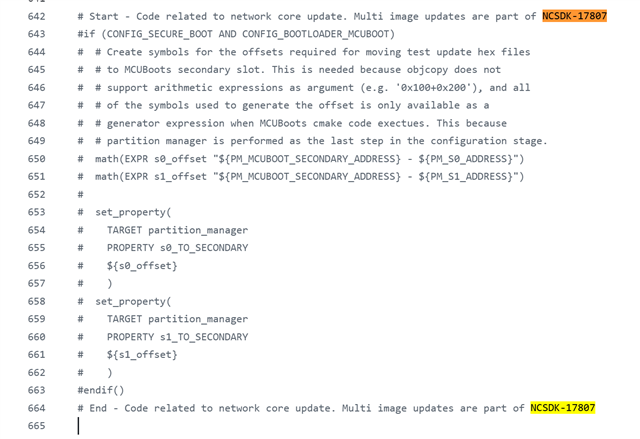
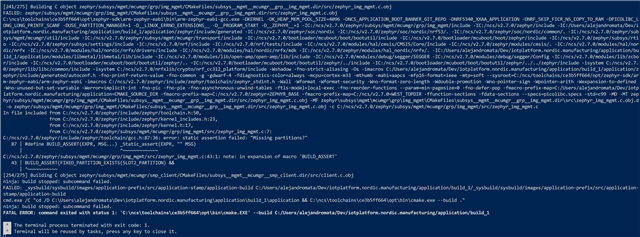
Moreover, we can do sysbuild updates for AppCore, but for our custom DTM/Manufacturing we can't get it to enable NetCore updates, once we enable SB_CONFIG_NETCORE_APP_UPDATE we get:
with this configuration
0020.sysbuild.conf
And this Kconfig.sysbuild (had to add txt so I was able to upload it here):
menu "Network core configuration"
depends on SUPPORT_NETCORE
config SUPPORT_NETCORE_DIRECT_TEST_MODE
bool
default y
choice NETCORE
prompt "Netcore image"
depends on SUPPORT_NETCORE && !EXTERNAL_CONFIGURED_NETCORE
config NETCORE_DIRECT_TEST_MODE
bool "direct test mode"
help
Use manufacturing dtm image as the network core image.
endchoice
# if !NETCORE_NONE
config NETCORE_IMAGE_NAME
default "direct_test_mode" if NETCORE_DIRECT_TEST_MODE
config NETCORE_IMAGE_PATH
default "../../../" if NETCORE_DIRECT_TEST_MODE
# endif # !NETCORE_NONE
endmenu
source "${ZEPHYR_BASE}/share/sysbuild/Kconfig"
Any advise, ideas would be appreciated!