Hi,
I am currently evaluating the new nRF54L15 DK development kit.
I installed VS Code v1.96.4 with nRF Connect for VS Code Extension Pack v2024.9.5. I am currently using SDK and toolchain v2.8.0 for my tests.
I was able to correctly download, compile and debug few example applications from the SDK like the 'blinky' app and the 'peripheral_lbs'.
Then I tried to do the same with examples provided in the BLE Fundamentals software pack (i.e bt-fund-main\v2.8.x-v2.7.0\l2\l2_e1_sol)
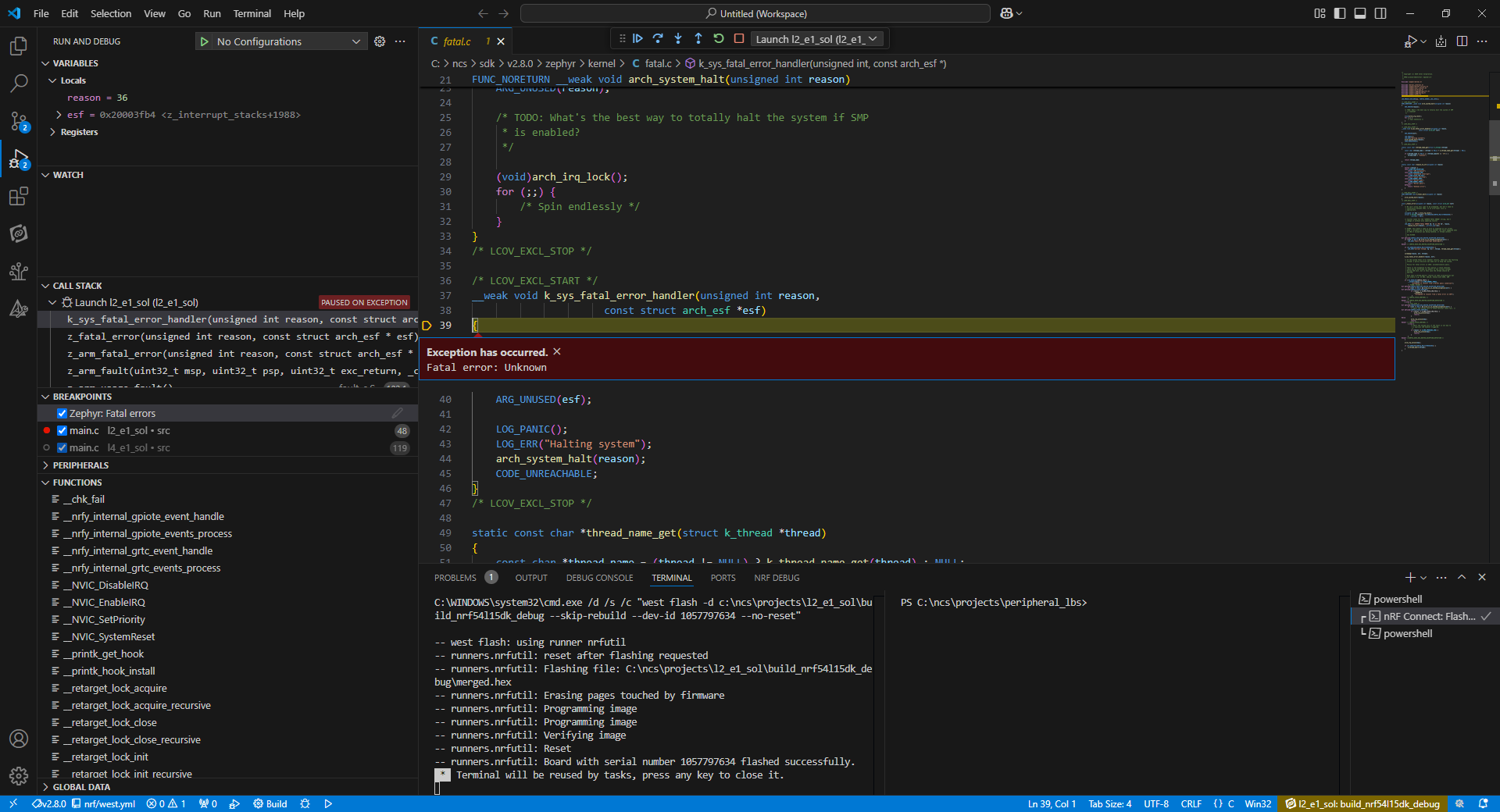
With 'l2_e1_sol' example app I am able to correctly compile and flash to the board (the code is executed like a charm); but when I try to start a debug session, an exception immediately occurs in Zephyr kernel and the debugger never jump into the main.
Is there any extra config to set to correctly debug the BLE Fundamentals example apps on nRF54L15 DK ?