Hi,
I've just migrated my project from NCS 2.6.1 to 2.9.0 and I'm having some problems with the UART.
I'm using the nRF52833 DK to communicate with another device and I noticed that I can send data from the nRF to the other device, however, I can't send data from the device to the nRF.
I decided to test with an example from Nordic (UART echo bot) and noticed that when I use the default pins of the UART, the communication works as it should (nRF <-> device). However, when I switch to the pins I'm using in the main project, communication only works in one direction (nRF -> device), i.e. there's no more communication (nrf <- device).
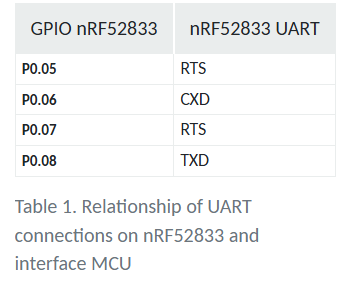
These are the pins I'm using:
&uart0 {
hw-flow-control; // Enable RTS and CTS
current-speed = <115200>;
data-bits = <8>;
stop-bits = "1";
parity = "none";
pinctrl-0 = <&uart0_default_alt>;
pinctrl-1 = <&uart0_sleep_alt>;
status = "okay";
};
&pinctrl {
uart0_default_alt: uart0_default_alt {
group1 {
psels = <NRF_PSEL(UART_TX, 0, 30)>,
<NRF_PSEL(UART_RX, 0, 8)>,
<NRF_PSEL(UART_RTS, 0, 6)>,
<NRF_PSEL(UART_CTS, 0, 7)>;
};
};
uart0_sleep_alt: uart0_sleep_alt {
group1 {
psels = <NRF_PSEL(UART_TX, 0, 30)>,
<NRF_PSEL(UART_RX, 0, 8)>,
<NRF_PSEL(UART_RTS, 0, 6)>,
<NRF_PSEL(UART_CTS, 0, 7)>;
low-power-enable;
};
};
};I disabled spi, i2c, adc, leds and buttons to make sure that there were no conflicts between pins.
Thank you!