I'm having trouble porting my project from the older SDK (2.6.0) to the new SDK.
I thought the most straightforward way to do that would be to start with a sample project similar to what I want to do. So I took the Matter Window Cover Sample. I have the nRF54L15-DK so I compiled the project for that board and it seems to work.
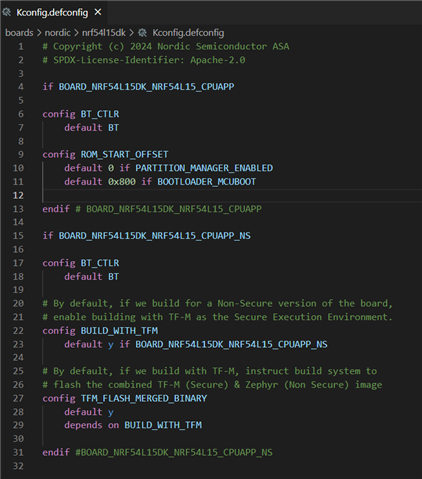
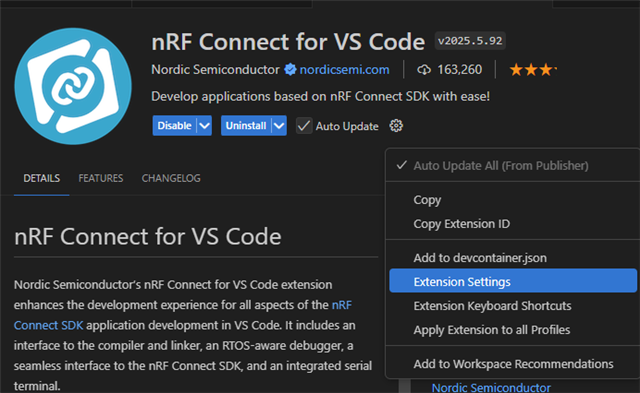
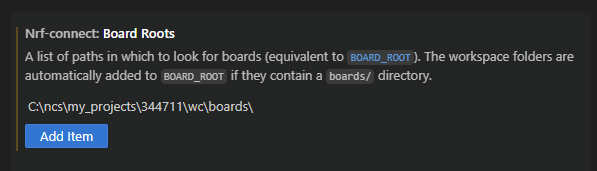
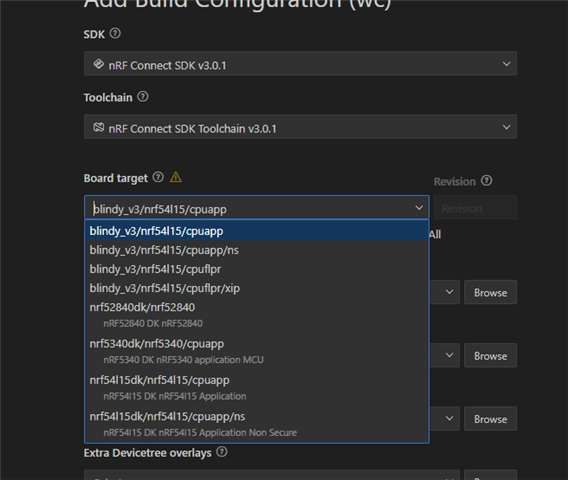
Now I use the VSCode button to create a new board. After closing VSCode and opening it again I can select my new custom board as the target for the build. It fails as my custom board is pretty much just boilerplate empty board definitions. So I start copying the contents of the nRF54L15-DK board definitions to my own custom board folder. The aim being to get the project to compile for the same dev kit with my custom board as the target. Ideally I would make no changes to the files but due to custom name I still have to do that. This also means I have to make another partition manager static definition file. I just copy the one used for the DK build and rename it for my custom board.
After fighting with some very hard to fix devicetree errors I get compilation process to reach the partition manager stage and there is something weird happening there. I have the exact same contents for the static definition file as the DK but for my board the build fails complaining about too many gaps in the partitions. I'm attaching the actual file I use for this.
pm_static_blindy_v3_nrf54l15_cpuapp.zip
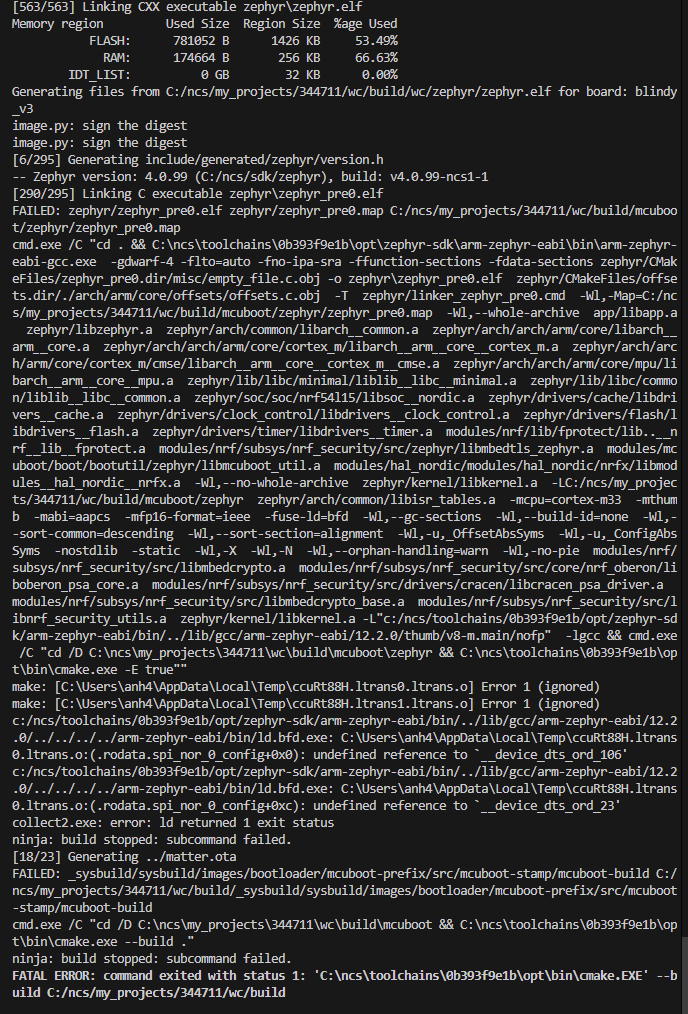
The error I get from partition manager is this:
-- Found partition manager static configuration : /home/tiit/code/nordic/blindy_matter/pm_static_blindy_v3_nrf54l15_cpuapp.yml Partition 'mcuboot' is not included in the dynamic resolving since it is statically defined. Partition 'mcuboot_pad' is not included in the dynamic resolving since it is statically defined. Partition 'mcuboot_primary' is not included in the dynamic resolving since it is statically defined. Partition 'mcuboot_primary_app' is not included in the dynamic resolving since it is statically defined. Partition 'settings_storage' is not included in the dynamic resolving since it is statically defined. Partition 'mcuboot_secondary' is not included in the dynamic resolving since it is statically defined. Partition manager failed: Incorrect amount of gaps found in static configuration. There must be exactly one gap in the static configuration to support placing the dynamic partitions (such as 'app'). Gaps found (2):0xd800-0x165000 0x17d000-0x172000 The most common solution to this problem is to fill the smallest of these gaps with statically defined partition(s) until there is only one gap left. Alternatively re-order the already defined static partitions so that only one gap remains. Failed to partition region flash_primary, size of region: 1462272 Partition Configuration: app: size: 1460224 factory_data: size: 4096 mcuboot: size: 53248 mcuboot_pad: size: 2048 mcuboot_primary: size: 1462272 mcuboot_primary_app: size: 1460224 settings_storage: size: 40960 -- Configuring incomplete, errors occurred!
Can you please check what I'm doing wrong here to cause this. This is somehow caused by using the custom board definition. I'm also attaching the whole custom board folder here just in case you can see something weird in there. This is just the folder that has to be extracted into the boards folder and after a VSCode restart it appears as a target for the build.
Hoping to hear back from you after the Easter Holidays,
Tiit



 ->
->  ->
->  ->
->
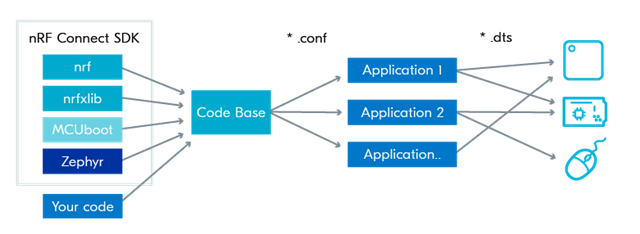 That said, if you have a board that will only be used for 1 project and the base will never see the need to be slightly modified to fit another application, then you can have your boards placed locally within the project themselves.
That said, if you have a board that will only be used for 1 project and the base will never see the need to be slightly modified to fit another application, then you can have your boards placed locally within the project themselves.