Hello.
I am also currently working with two nRF54L15-DK kits with the nRF Connect SDK and Toolchain, both v3.0.2. I am using the latest updated examples from the SDK channel_sounding_ras_initiator and channel_sounding_ras_reflector.
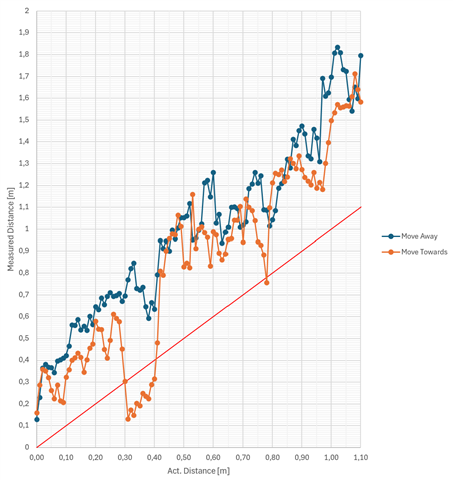
I did several test runs while holding both devices stable at the same position and also while moving one over time. For all the test runs, the measurements are way off from what they should measure. Way off meaning:
Actual distance --> Measured distance (referring to the IFFT values)
0.3 m --> 0.45m up to 0.89m
0.5 m --> 0.47m up to 1.1m
1 m --> 1.6m up to 2m
(I can also provide more measurements, but I think this points out what I mean)
I also have the problem that the measurements are not stable even if they are fixated at the same position. I always measured for 2 minutes straight (getting a value every 5 seconds) and also tried different sliding windows (10, 50, 75, 100 samples per averaging), but it always varied by at least 10 cm up to 80 cm. (Depending on the distance)
I had seen the Nordic Demonstration (Youtube-Demo) beforehand, and there the accuracy and precision were way better.
Is it still an issue with the algorithm, as suggested by this post?
Do you have any tips on how to improve the sample project to get better accuracy? (Until now I have only changed the sliding window size as mentioned above.)
Thanks in advance for the help.