
Hello Support Team,
I am currently testing the new Channel Sounding feature on two nRF54L15 boards, on which I flashed your Channel Sounding samples (initiator and reflector).
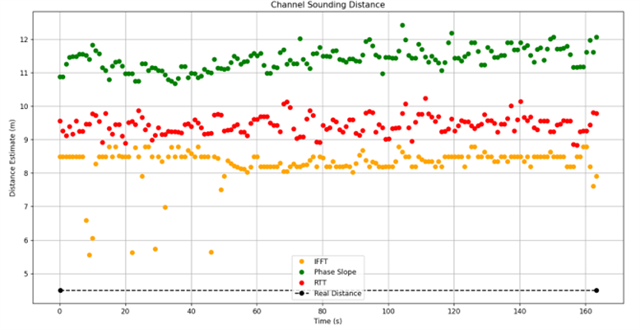
I noticed that the distance accuracy (for example, using the IFFT) is not as precise as I expected (see the graph below).
I tested with real distances of 5 m and 4.5 m, but the measured values were significantly different — with more than 4 m of error for the 4.5 m test. I am a bit confused about this behavior.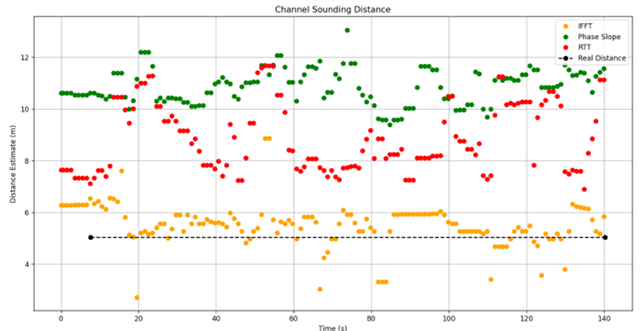
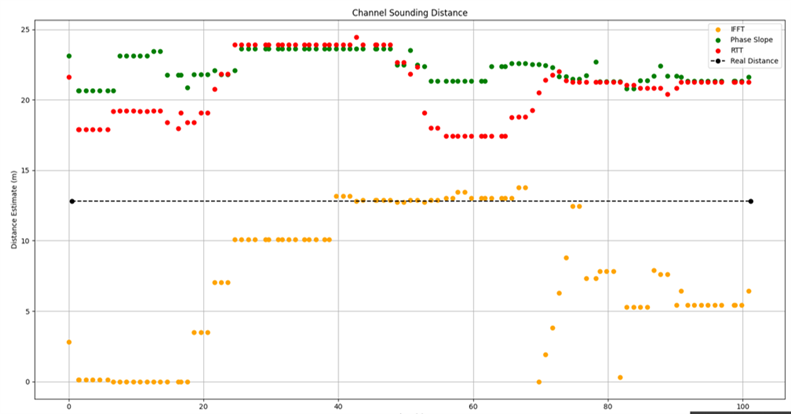
I also performed a test at 13 m in another environment, this time with more Bluetooth devices nearby that could generate interference. However, the IFFT results were very irregular, and I find it difficult to understand its behavior.
Do you have any idea what could cause this inaccuracy ?
For these tests, I was in a typical indoor environment.
The only change I made in the code was adjusting the sleepins time from 5 s to 1 s.
I am using NCS version 3.1.0.
Thank you for your help


