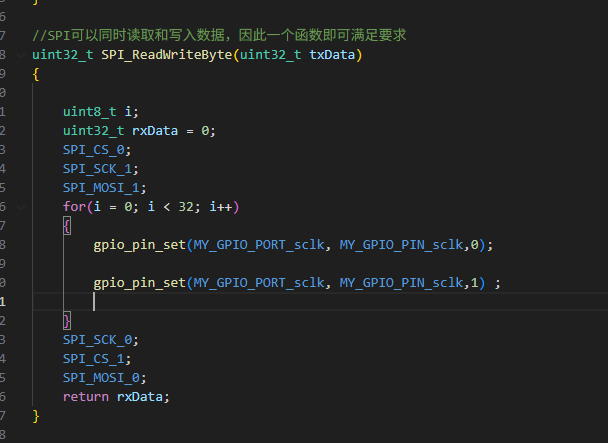
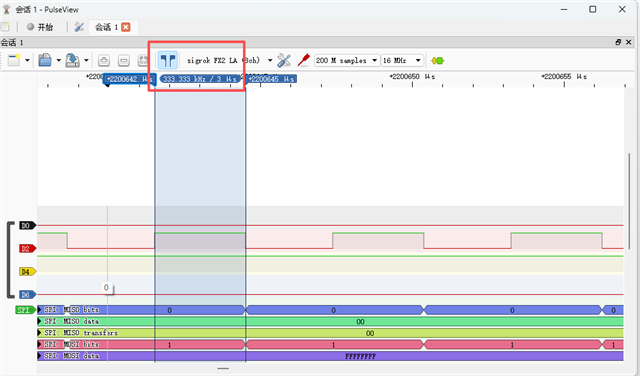
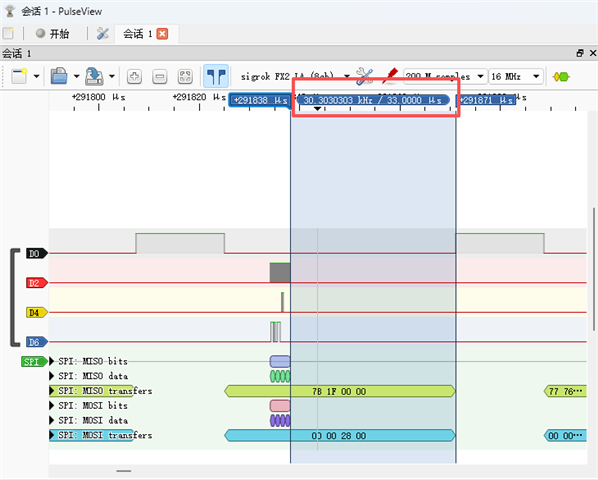
Hello, we are currently testing the output of square waves through GPIO output pins. However, I found that a single operation to set the GPIO output pin high or low using the gpio_pin_set function takes about 3 microseconds, so the transmitted square wave does not meet our speed requirements. I would like to know what is causing the slow GPIO output speed—is it the internal clock being too slow? Or too many parallel tasks? (In debug mode, the chip does not jump to other tasks and executes GPIO operations continuously.) Are there better GPIO configuration functions? Please provide us with assistance.