Hello, I'm trying to make samples/bluetooth/hci_spi work on my nRF54L15-DK however I encounter some issues My device tree overlay is as followed:
&pinctrl {
spi21_default_alt: spi21_default_alt {
group1 {
psels = <NRF_PSEL(SPIS_SCK, 1, 11)>,
<NRF_PSEL(SPIS_MOSI, 1, 12)>,
<NRF_PSEL(SPIS_MISO, 1, 13)>,
<NRF_PSEL(SPIS_CSN, 1, 9)>;
};
};
};
&spi21 {
compatible = "nordic,nrf-spis";
status = "okay";
def-char = <0x75>;
pinctrl-0 = <&spi21_default_alt>;
pinctrl-names = "default";
/delete-property/ rx-delay-supported;
/delete-property/ rx-delay;
bt-hci@0 {
compatible = "zephyr,bt-hci-spi-slave";
reg = <0>;
irq-gpios = <&gpio1 8 (GPIO_ACTIVE_HIGH | GPIO_PULL_DOWN)>;
};
};
/ {
aliases {
/delete-property/ sw0;
/delete-property/ sw1;
/delete-property/ sw2;
/delete-property/ sw3;
/delete-property/ mcuboot-button0;
};
/delete-node/ buttons;
};
/delete-node/ &spi00;
/delete-node/ &spi30;
/delete-node/ &spi20;
/delete-node/ &spi22;
&uart30 {
status = "disabled";
};
I know that spi21.def-char should be <0x00> however for my test purpose it helps me to diagnose my SPI connection problem.
I also deleted all SPI devices and all buttons to prevent any conflict with development kit hardware
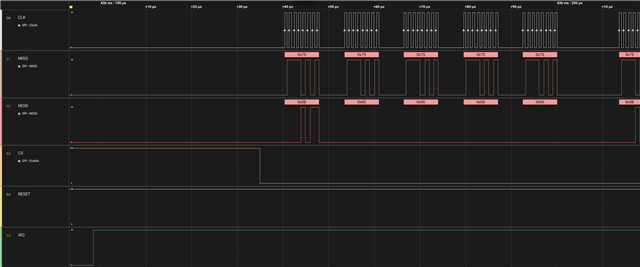
When I try to start the SPI communication with it I get the following when all pins are plugged.
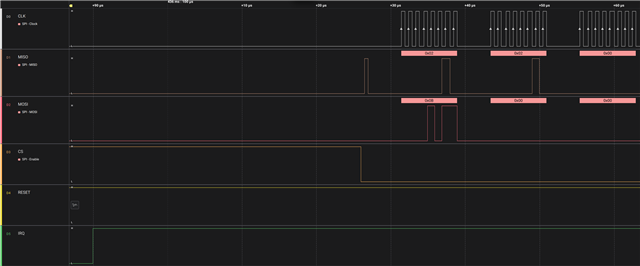
If I unplug CS and plug it directly to ground I get the following result: