
I have an IoT project that reads data from a proprietary device via an I2c SBIffer.
The device consists of a controller and a small display, which are connected via an I2C bus.
I'm using a XIAO-nrF52840 from Seed-Studio
My IDE is Segger Embedded-Studio 5-70a with nRF5_SDK_17.1.0 and Softdevice 140
I started with ble_app_blinky example from the SDK-folder:
.\Nordic Semiconductor\nRF5_SDK_17.1.0_ddde560\examples\ble_peripheral\ble_app_blinky\pca10056\s140\ses
The I2C sniffer works perfectly as long as I don't activate the BLE stack and disable the RTC1 interrupt.
But now I want to send my data (as a BLE-peripheral) via Bluetooth, but when activating the BLE-Stack my sniffer is no longer working.
I discovered that the BLE stack, along with Timer0 and RTC1, is running at priority level 0 and the SDK does not allow other interrupts running with priority = 0.
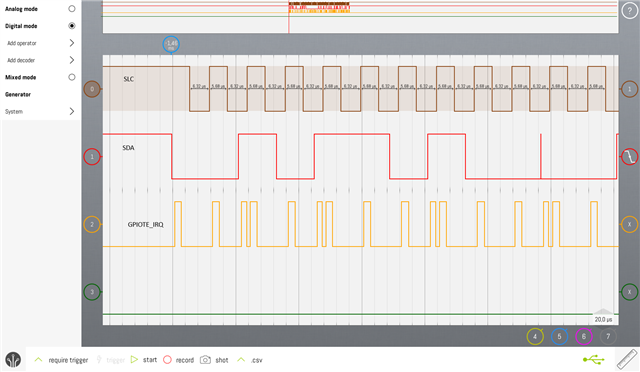
My I2C sniffer uses the GPIO interrupt to evaluate the edges of the SDA and SCL signals. The I2C communication runs at approximately 83 kHz, and I need the shortest possible interrupt latency to capture the signals correctly.
On the other hand, only a very short interrupt execution time (< 3us) is required.
Therefore, I tried a hack without permission of the SDK and moved the interrupts use by the BLE-stack to priority level 1.
Hoping that the SDK will tolerate my sacrilege.
NVIC_SetPriority (RADIO_IRQn,1); NVIC_SetPriority (TIMER0_IRQn,1); NVIC_SetPriority (RTC0_IRQn,1);
And yes the BLE communication is still working :-)
Now I tried a test with a timer-3 interrupt, which I programmed without the SDK using direct register access and set the timer interrupt priority to level 0.
The interrupt service routine does nothing except clearing the interrupt event.
void TIMER3_IRQHandler(void)
{
nrf_timer->EVENTS_COMPARE[0] = 0;
}
Unfortunately, I get an application error as soon as the timer interrupt is executet.
<error> app: SOFTDEVICE: INVALID MEMORY ACCESS
- Is there perhaps still a small chance of getting my interrupt to work with priority 0?
- What triggers the error? Or how does the SDK manage to figure out that someone is above it?
- Do I have a better chance if I use the NRF-Connect SDK?
Maybe I'll have a second chance.
The I2c communication has a polling sequence of 10ms.

I could try switching between I2C sniffer and BLE communication.
Reading an I2C packet takes about 1-2 ms; the remaining time could be used by the BLE stack.
Simply disabling the BLE interrupt for 1-2 ms does not work, but perhaps there is an SDK function to stop BLE for a short time.
If all of that is not possible, unfortunately I have no other option than to provide another controller for the I2C sniffer and connect it to the NRF chip via a serial interface for example.
BTW
As far as I know, there is no chance to create an I2C sniffer using the CPU's I2C (TWI) controller.
