
Symptoms
Reproduction
The following bare-metal program reproduces the miss on any nRF52805 DK. No softdevice needed; the [155] workaround register is applied explicitly.
Hardware: bridge P0.02 to P0.03 with a wire. Observe P0.02, P0.03, P0.04 on a signal analyzer.
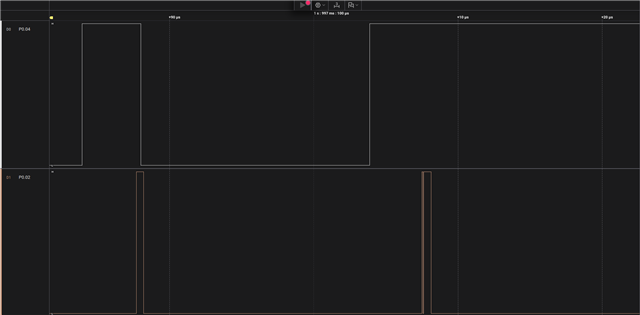
Phase 1 (first 2 s): a single clean 500 ns pulse on P0.02 each cycle. GPIOTE detects every rising edge; P0.04 responds on every cycle.
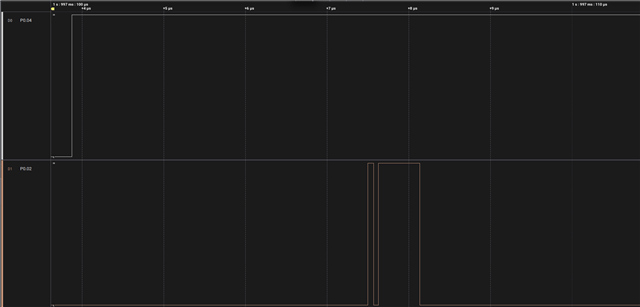
Phase 2 (after 2 s): a 62.5 ns pre-pulse is added immediately before the main pulse. P0.04 stops responding; GPIOTE misses the main pulse rising edge on every cycle.
#include <nrf.h>
#include <nrf_delay.h>
/*
* nRF52805 GPIOTE edge-detection bug reproducer.
*
* Bridge P0.02 -> P0.03 with a wire.
*
* TIMER1: 16 MHz, 16-bit, 50 kHz period (CC[2]=319).
* TIMER0: 16 MHz, 16-bit, cleared each cycle by TIMER1 CC[2] via PPI fork.
*
* P0.02 (output): pulse source driven by TIMER0 via PPI.
* P0.03 (input): GPIOTE LOTOHI event, bridged to P0.02.
* P0.04 (output): driven LOW on each detected rising edge, HIGH at period restart.
*
* Phase 1 (2s): single 500 ns pulse — P0.04 responds on every cycle.
* Phase 2: 62.5 ns pre-pulse added before the main pulse —
* P0.04 stops responding (GPIOTE misses the main pulse edge).
*
* Errata [155]: workaround register written for event channel.
* Errata [156]: TASKS_CLR[even] replaced with POLARITY_HiToLo + TASKS_OUT[even].
*/
#define PIN_OUT_A 2
#define PIN_IN_B 3
#define PIN_OUT_C 4
#define GPIOTE_CH_A 0 /* task, P0.02 */
#define GPIOTE_CH_B 4 /* event, P0.03, LOTOHI */
#define GPIOTE_CH_C 2 /* task, P0.04 */
#define PPI_CH_PERIOD 0
#define PPI_CH_PRE_SET 1
#define PPI_CH_PRE_CLR 2
#define PPI_CH_DETECT 3
#define PPI_CH_PULSE_SET 4
#define PPI_CH_PULSE_CLR 5
int main(void)
{
/* GPIO */
NRF_P0->PIN_CNF[PIN_OUT_A] =
(GPIO_PIN_CNF_DIR_Output << GPIO_PIN_CNF_DIR_Pos) |
(GPIO_PIN_CNF_INPUT_Disconnect << GPIO_PIN_CNF_INPUT_Pos) |
(GPIO_PIN_CNF_DRIVE_S0S1 << GPIO_PIN_CNF_DRIVE_Pos);
NRF_P0->PIN_CNF[PIN_IN_B] =
(GPIO_PIN_CNF_DIR_Input << GPIO_PIN_CNF_DIR_Pos) |
(GPIO_PIN_CNF_INPUT_Connect << GPIO_PIN_CNF_INPUT_Pos) |
(GPIO_PIN_CNF_PULL_Pulldown << GPIO_PIN_CNF_PULL_Pos);
NRF_P0->PIN_CNF[PIN_OUT_C] =
(GPIO_PIN_CNF_DIR_Output << GPIO_PIN_CNF_DIR_Pos) |
(GPIO_PIN_CNF_INPUT_Disconnect << GPIO_PIN_CNF_INPUT_Pos) |
(GPIO_PIN_CNF_DRIVE_H0H1 << GPIO_PIN_CNF_DRIVE_Pos);
/* GPIOTE — [156]: even task channels use HiToLo + TASKS_OUT */
NRF_GPIOTE->CONFIG[GPIOTE_CH_A] =
(GPIOTE_CONFIG_MODE_Task << GPIOTE_CONFIG_MODE_Pos) |
(PIN_OUT_A << GPIOTE_CONFIG_PSEL_Pos) |
(GPIOTE_CONFIG_POLARITY_HiToLo << GPIOTE_CONFIG_POLARITY_Pos) |
(GPIOTE_CONFIG_OUTINIT_Low << GPIOTE_CONFIG_OUTINIT_Pos);
NRF_GPIOTE->CONFIG[GPIOTE_CH_B] =
(GPIOTE_CONFIG_MODE_Event << GPIOTE_CONFIG_MODE_Pos) |
(PIN_IN_B << GPIOTE_CONFIG_PSEL_Pos) |
(GPIOTE_CONFIG_POLARITY_LoToHi << GPIOTE_CONFIG_POLARITY_Pos);
/* [155]: workaround for double-fire on edges < 1.3 us apart */
*(volatile uint32_t *)(NRF_GPIOTE_BASE + 0x600 + (4 * GPIOTE_CH_B)) = 1;
NRF_GPIOTE->CONFIG[GPIOTE_CH_C] =
(GPIOTE_CONFIG_MODE_Task << GPIOTE_CONFIG_MODE_Pos) |
(PIN_OUT_C << GPIOTE_CONFIG_PSEL_Pos) |
(GPIOTE_CONFIG_POLARITY_HiToLo << GPIOTE_CONFIG_POLARITY_Pos) |
(GPIOTE_CONFIG_OUTINIT_High << GPIOTE_CONFIG_OUTINIT_Pos);
/* TIMER1: 50 kHz period */
NRF_TIMER1->MODE = TIMER_MODE_MODE_Timer;
NRF_TIMER1->BITMODE = TIMER_BITMODE_BITMODE_16Bit;
NRF_TIMER1->PRESCALER = 0;
NRF_TIMER1->CC[2] = 319;
NRF_TIMER1->SHORTS = TIMER_SHORTS_COMPARE2_CLEAR_Msk;
/* TIMER0: pulse generator, cleared each cycle */
NRF_TIMER0->MODE = TIMER_MODE_MODE_Timer;
NRF_TIMER0->BITMODE = TIMER_BITMODE_BITMODE_16Bit;
NRF_TIMER0->PRESCALER = 0;
NRF_TIMER0->CC[0] = 56; /* pre-pulse HIGH (62.5 ns wide) */
NRF_TIMER0->CC[1] = 57; /* pre-pulse LOW */
NRF_TIMER0->CC[2] = 58; /* main pulse HIGH (500 ns wide) */
NRF_TIMER0->CC[3] = 66; /* main pulse LOW */
/* PPI */
NRF_PPI->CH[PPI_CH_PERIOD].EEP = (uint32_t)&NRF_TIMER1->EVENTS_COMPARE[2];
NRF_PPI->CH[PPI_CH_PERIOD].TEP = (uint32_t)&NRF_GPIOTE->TASKS_SET[GPIOTE_CH_C];
NRF_PPI->FORK[PPI_CH_PERIOD].TEP = (uint32_t)&NRF_TIMER0->TASKS_CLEAR;
NRF_PPI->CH[PPI_CH_PRE_SET].EEP = (uint32_t)&NRF_TIMER0->EVENTS_COMPARE[0];
NRF_PPI->CH[PPI_CH_PRE_SET].TEP = (uint32_t)&NRF_GPIOTE->TASKS_SET[GPIOTE_CH_A];
NRF_PPI->CH[PPI_CH_PRE_CLR].EEP = (uint32_t)&NRF_TIMER0->EVENTS_COMPARE[1];
NRF_PPI->CH[PPI_CH_PRE_CLR].TEP = (uint32_t)&NRF_GPIOTE->TASKS_OUT[GPIOTE_CH_A];
NRF_PPI->CH[PPI_CH_DETECT].EEP = (uint32_t)&NRF_GPIOTE->EVENTS_IN[GPIOTE_CH_B];
NRF_PPI->CH[PPI_CH_DETECT].TEP = (uint32_t)&NRF_GPIOTE->TASKS_OUT[GPIOTE_CH_C];
NRF_PPI->CH[PPI_CH_PULSE_SET].EEP = (uint32_t)&NRF_TIMER0->EVENTS_COMPARE[2];
NRF_PPI->CH[PPI_CH_PULSE_SET].TEP = (uint32_t)&NRF_GPIOTE->TASKS_SET[GPIOTE_CH_A];
NRF_PPI->CH[PPI_CH_PULSE_CLR].EEP = (uint32_t)&NRF_TIMER0->EVENTS_COMPARE[3];
NRF_PPI->CH[PPI_CH_PULSE_CLR].TEP = (uint32_t)&NRF_GPIOTE->TASKS_OUT[GPIOTE_CH_A];
NRF_PPI->CHENSET = (1 << PPI_CH_PERIOD) |
(1 << PPI_CH_DETECT) |
(1 << PPI_CH_PULSE_SET) |
(1 << PPI_CH_PULSE_CLR);
NRF_POWER->TASKS_CONSTLAT = 1;
NRF_TIMER0->TASKS_CLEAR = 1;
NRF_TIMER1->TASKS_CLEAR = 1;
NRF_TIMER0->TASKS_START = 1;
NRF_TIMER1->TASKS_START = 1;
/* Phase 1: single 500 ns pulse, ~2 s */
nrf_delay_ms(2000);
/* Phase 2: enable pre-pulse — bug triggers */
NRF_PPI->CHENSET = (1 << PPI_CH_PRE_SET) | (1 << PPI_CH_PRE_CLR);
while (1) {}
}
What to look for on the analyzer
Phase 1 — working:
P0.02: ___|‾‾‾‾‾|_________________ (500 ns pulse)
P0.03: ___|‾‾‾‾‾|_________________ (same, bridged)
P0.04: ‾‾‾‾|_______|‾‾‾‾‾‾‾‾‾‾‾‾‾ (responds to every edge)
Phase 2 — bug:
P0.02: ____|‾|_|‾‾‾‾‾‾‾|__________ (62.5 ns pre-pulse + 500 ns main pulse)
P0.03: ____|‾|_|‾‾‾‾‾‾‾|__________ (same, bridged)
P0.04: ‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾‾ (locked HIGH — main edge missed)
Workaround
Adding hysteresis in hardware so that the pre-pulse does not exist.