Hi,
I'm reading 1 byte of data from a Macronics MX25R64, but the execution speed of the read operation varies depending on the SDK version.
With SDK 3.1.1, it's possible to read one byte of data in about 60us.
SDK 3.2.4 reads one byte of data in approximately 1.3 ms.
This measurement was performed by setting the GPIO output to High before executing the flash read and Low upon completion of the execution.
Based on my testing with a custom board, the SPI instance used is spi00. The communication pins are the same as those used on the NRF54L15 DK.
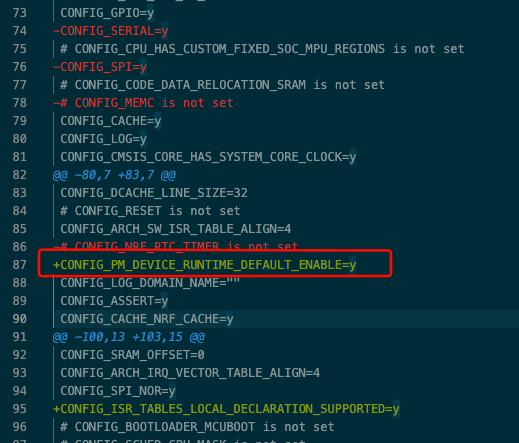
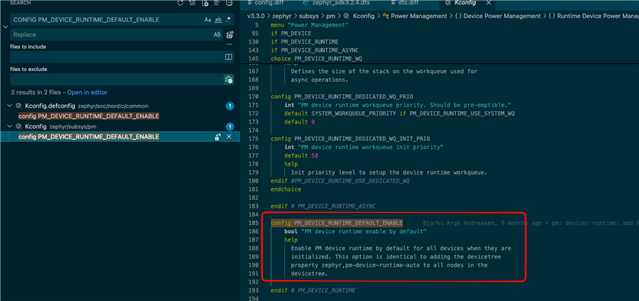
I believe this problem is caused by a change in the major version of the nrfx driver.
However, I cannot identify it even after reviewing the following change log.
https://github.com/nordicsemi/nrfx/blob/master/CHANGELOG.md
I believe this is due to a change in the SPI driver, but no major changes to SPIM were mentioned in the major update.
Would you tell me what the problem is?
Best regards,
Hiroki