Hi,
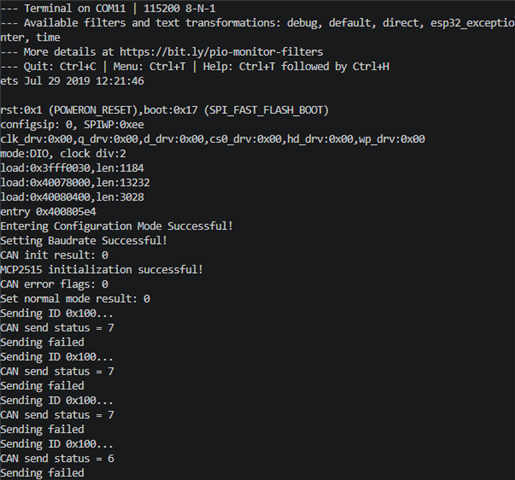
can anyone help me with this situations that i'm facing from a 1 month so i'm connecting esp32 controller to seengreat RS485 Dual CAN Bus moduler and the other hand i'm connecting nrf9160 to seengreat RS485 Dual CAN Bus moduler but i can't send or receive any messages through this and i attach the both screenshot from nrf serial terminal and from esp32 controller terminal and also i attach my overlay code and my both project files. i tried with 125,250,500 KBPS bus speed but i didn't make it and this can bus moduler have 16MHZ and it has 120 ohm resister attached with the moduler and i tried spi-max-frequency = <125000>,<250000>, <500000>, <1000000>.WACS (2).zipWACS_esp32 (2).zip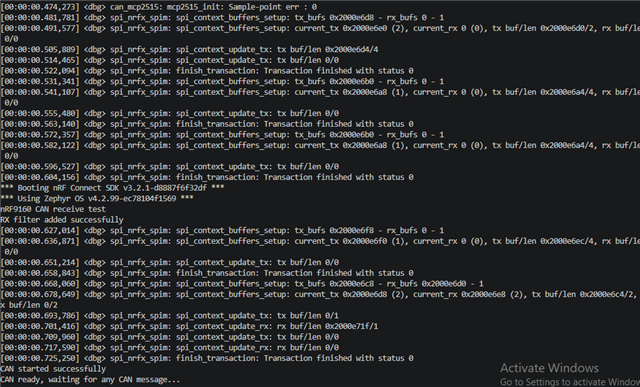
here is my overlay file code
i spend too much time on this and still didn't get anything from this so please help me to get through with this and what else i can do for debugging cuz i change the wires many times and now i order new can bus moduler to get confirmation about that is the moduler don't have the problem or what, i don't know
thanks
vivek


