I am using the RTC to generate a square wave signal.
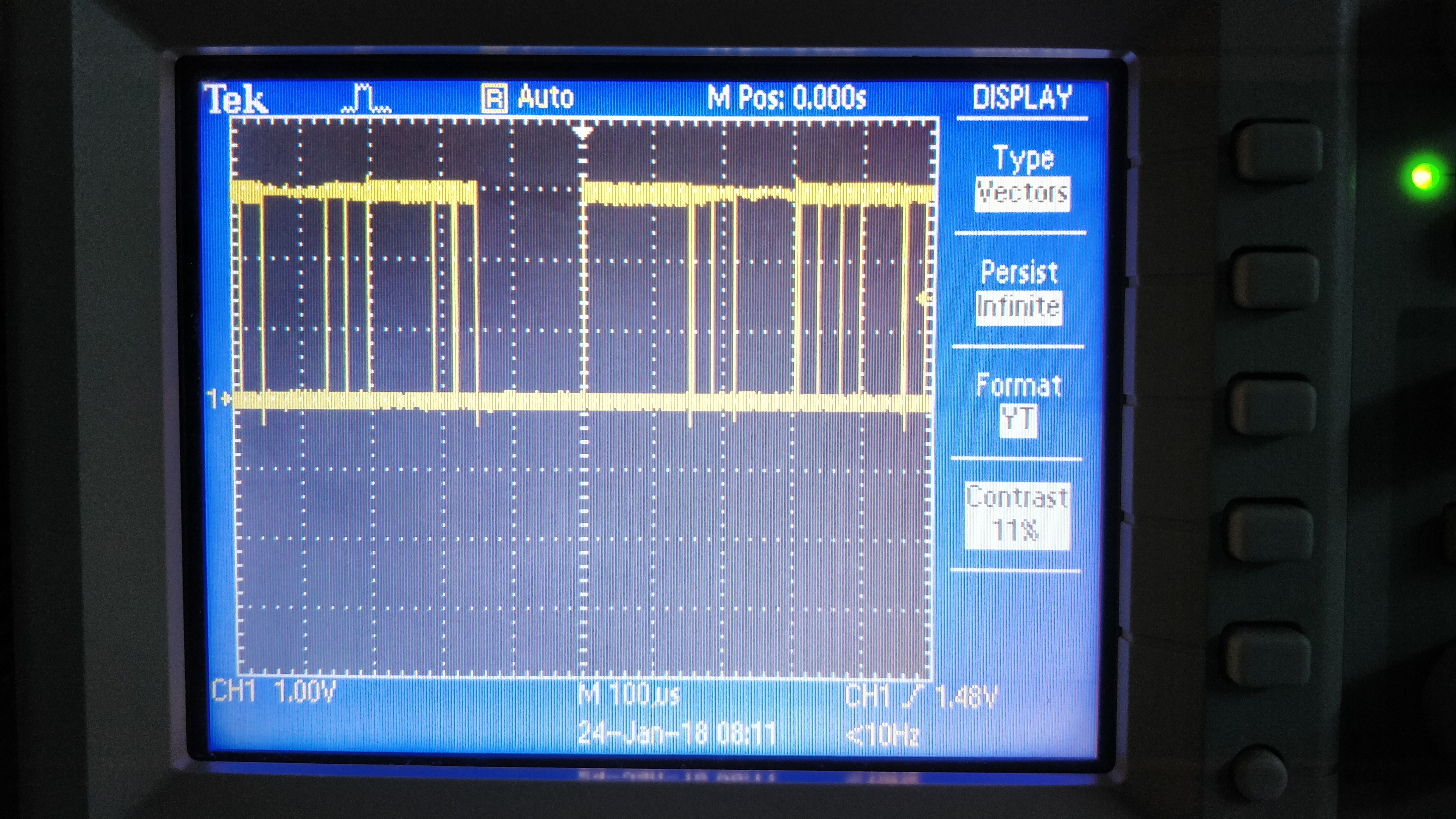
I have two issues. One is that nothing I do on the prescaler or the Count Compare is having an influence on the frequency produced. The other is that I have significant jitter on the time axis (see image below).
Here is my code that currently yields a frequency of 3.3 kHz:
NRF_CLOCK->LFCLKSRC = (CLOCK_LFCLKSRC_SRC_Xtal << CLOCK_LFCLKSRC_SRC_Pos);
NRF_CLOCK->EVENTS_LFCLKSTARTED = 0;
NRF_CLOCK->TASKS_LFCLKSTART = 1;
while (NRF_CLOCK->EVENTS_LFCLKSTARTED == 0){}
NRF_CLOCK->EVENTS_LFCLKSTARTED = 0;
NRF_RTC1->PRESCALER = 4;
NRF_RTC1->EVTENSET = RTC_EVTENSET_COMPARE0_Msk;
NRF_RTC1->CC[0] = 10;
NRF_PPI->CH[1].EEP = (uint32_t)&NRF_RTC1->EVENTS_COMPARE[0];
NRF_PPI->CH[1].TEP = (uint32_t)&NRF_GPIOTE->TASKS_OUT[1];
NRF_PPI->CH[2].EEP = (uint32_t)&NRF_RTC1->EVENTS_COMPARE[0];
NRF_PPI->CH[2].TEP = (uint32_t)&NRF_RTC1->TASKS_CLEAR;
NRF_GPIOTE->CONFIG[1] =((GPIOTE_CONFIG_MODE_Task << GPIOTE_CONFIG_MODE_Pos)
|(CONV << GPIOTE_CONFIG_PSEL_Pos)
|(GPIOTE_CONFIG_POLARITY_Toggle << GPIOTE_CONFIG_POLARITY_Pos)
|(GPIOTE_CONFIG_OUTINIT_Low << GPIOTE_CONFIG_OUTINIT_Pos));
NRF_RTC1->TASKS_START = 1;
Is the PPI channel resetting the counters necessary / is there a better way to do it?
What am I doing wrong for setting the frequency? Is the jitter something to be expected? I cannot resort to using TIMERX as they are already occupied (SD, SPI and another square wave at 4 MHz).