
Hi,
I tried interfacing LIS3Dh using SPI, I used the SPI example to start with, when I didn't get the desired result, I look numerous question on the forum and tried to modify the code but it does not seem to be working.
I am simply trying to read WHO_AM_I register/or any other register, I am getting FF always,
the sensor is embedded on PCB with following configurations:
Configurations:
| LIS3DH | nrf 51822 pin | sdk_config.h |
| SCK | 9 | SPI_SCK_PIN 9 |
| SDI | 10 | SPI_MOSI_PIN 10 |
| CS | 12 | SPI_SS_PIN 12 |
| SDO | 7 | SPI_MISO_PIN 11 |
Below code is trying to read who_am_i ( 0x0F)
#define SPI_INSTANCE 0 /**< SPI instance index. */
static const nrf_drv_spi_t spi = NRF_DRV_SPI_INSTANCE(SPI_INSTANCE); /**< SPI instance. */
static volatile bool spi_xfer_done; /**< Flag used to indicate that SPI instance completed the transfer. */
#define TEST_STRING "Nordic"
static uint8_t m_tx_buf[]={0x0F}; /**< TX buffer. */
static uint8_t m_rx_buf[]={0x00, 0x00,0x00, 0x00,0x00}; /**< RX buffer. */
//static const uint8_t m_length = sizeof(m_rx_buf); /**< Transfer length. */
/**
* @brief SPI user event handler.
* @param event
*/
void spi_event_handler(nrf_drv_spi_evt_t const * p_event)
{
spi_xfer_done = true;
SEGGER_RTT_printf(0,"Transfer completed.\r\n");
if (1 != 0)
{
SEGGER_RTT_printf(0," Received: \r\n");
NRF_LOG_HEXDUMP_INFO(m_rx_buf, strlen((const char *)m_rx_buf));
SEGGER_RTT_printf(0, "value: %u \r\n", *m_rx_buf);
bsp_board_led_invert(BSP_BOARD_LED_1);
}
}
int main(void)
{
bsp_board_leds_init();
APP_ERROR_CHECK(NRF_LOG_INIT(NULL));
SEGGER_RTT_printf(0,"SPI example\r\n");
nrf_drv_spi_config_t spi_config = NRF_DRV_SPI_DEFAULT_CONFIG;
spi_config.ss_pin = SPI_SS_PIN;
spi_config.miso_pin = SPI_MISO_PIN;
spi_config.mosi_pin = SPI_MOSI_PIN;
spi_config.sck_pin = SPI_SCK_PIN;
spi_config.frequency= NRF_DRV_SPI_FREQ_8M;
spi_config.mode= NRF_DRV_SPI_MODE_2;
APP_ERROR_CHECK(nrf_drv_spi_init(&spi, &spi_config, spi_event_handler));
uint8_t sizerx = 2;
spi_xfer_done = false;
APP_ERROR_CHECK(nrf_drv_spi_transfer(&spi, m_tx_buf, 1, m_rx_buf, sizerx));
while (!spi_xfer_done){
__WFE();
}
if(sizerx!=0)
{
SEGGER_RTT_printf(0,"Received[0]: %x %x %x %x %x \n\r",m_rx_buf[0],m_rx_buf[1],m_rx_buf[2],m_rx_buf[3],m_rx_buf[4]);
}else{
SEGGER_RTT_printf(0,"no value return from \r\n");
}
SEGGER_RTT_printf(0,"miso-> %u \r\n", nrf_gpio_pin_out_read(11));
SEGGER_RTT_printf(0,"mosi-> %u \r\n", nrf_gpio_pin_out_read(10));
SEGGER_RTT_printf(0,"ss-> %u \r\n", nrf_gpio_pin_out_read(12));
}
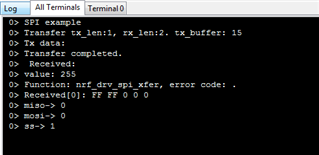
log output ( in every case I am getting FF value in rx_buff )
SDK Used: 12.2
using JLink to transfer the via SWO
I have tried with different modes and frequencies also but no luck.
Please help.
