This thread discusses the nrf51 devzone.nordicsemi.com/.../current-consumption-when-using-rtc-ppi-and-gpiote It says that the PPI (for nrf51 chip revisions up to rev 3) keeps the 16mhz clock on, and that Nordic doesn't recommend this combination for low power. Is that still true for the nrf52?
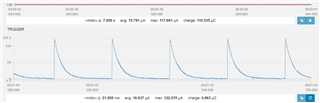
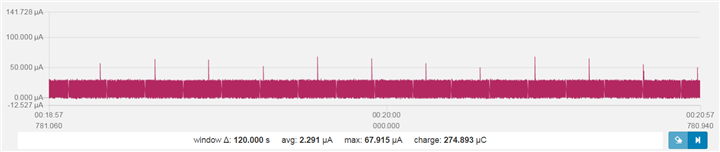
I am doing the same thing as that thread: using the rtc to generate an event, which the ppi connects to a gpiote out task, which toggles an out pin. (all without cpu waking.) If someone has not already measured the current consumption for this combination, then I will just go back to using an ISR ( rtc generates an interrupt, and the ISR toggles the pin using the GPIO device. Current consumption is only the current of the sleeping mcu and rtc.)
The product specs don't seem to have an electrical specification for the PPI, nor a value for the current of a GPIOTE out channel.