
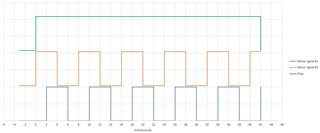
I need to drive a stepper motor without software intervention, since strict timing is a must.In the following image you can see the required wave-forms - the motor requires two PWM like signals, but i also need to be able to stop exactly after n cycles, where n can be from 1 to 1000. I saw the sample code added next, which generates the required wave-form, but have no way of stopping it after the n'th cycle, except by generating a timer SW interrupt where i stop the wave-form. But this is SW dependent and i want fully automation.
NRF_GPIOTE->CONFIG[0] = GPIOTE_CONFIG_MODE_Task << GPIOTE_CONFIG_MODE_Pos |
GPIOTE_CONFIG_POLARITY_Toggle << GPIOTE_CONFIG_POLARITY_Pos |
IO_UART_RXD /* IO_MOT_APHASE */ << GPIOTE_CONFIG_PSEL_Pos |
GPIOTE_CONFIG_OUTINIT_Low << GPIOTE_CONFIG_OUTINIT_Pos;
NRF_GPIOTE->CONFIG[1] = GPIOTE_CONFIG_MODE_Task << GPIOTE_CONFIG_MODE_Pos |
GPIOTE_CONFIG_POLARITY_Toggle << GPIOTE_CONFIG_POLARITY_Pos |
IO_UART_TXD /* IO_MOT_BPHASE */<< GPIOTE_CONFIG_PSEL_Pos |
GPIOTE_CONFIG_OUTINIT_Low << GPIOTE_CONFIG_OUTINIT_Pos;
// 16mhz / 2^4 = 1mhz --> 1us --> 2000 --> 2ms
NRF_TIMER1->PRESCALER = 4;
NRF_TIMER1->CC[1] = 2000;
NRF_TIMER1->CC[2] = 4000;
NRF_TIMER1->SHORTS = TIMER_SHORTS_COMPARE2_CLEAR_Enabled << TIMER_SHORTS_COMPARE2_CLEAR_Pos;
NRF_PPI->CH[0].EEP = (uint32_t) &NRF_TIMER1->EVENTS_COMPARE[1]; // input = compare event of timer1
NRF_PPI->CH[0].TEP = (uint32_t) &NRF_GPIOTE->TASKS_OUT[0]; // output = polarity toggle of the selected gpio
NRF_PPI->CH[1].EEP = (uint32_t) &NRF_TIMER1->EVENTS_COMPARE[2];
NRF_PPI->CH[1].TEP = (uint32_t) &NRF_GPIOTE->TASKS_OUT[1];
NRF_PPI->CHENSET = (PPI_CHENSET_CH0_Enabled << PPI_CHENSET_CH0_Pos) | (PPI_CHENSET_CH1_Enabled << PPI_CHENSET_CH1_Pos);
*(uint32_t*)0x40009C0C = 1; // pan73_workaround
NRF_TIMER1->TASKS_START = 1; // Start timer

