
Hi, all
i have using adxl335 sensor interfacing ADC ;i have done code ,i wanted to know is it correct or the way i have developed the code can any one suggest me.
How can i print those x,y,z value on UART and send via BLE.
Hi, all
i have using adxl335 sensor interfacing ADC ;i have done code ,i wanted to know is it correct or the way i have developed the code can any one suggest me.
How can i print those x,y,z value on UART and send via BLE.

Have you tested the code?
Does it work? Or are you running into any issues?
Maybe you could upload your code instead of the screenshots?
Then I could test it myself.
Best regards,
Joakim

ok ,i will upload that code
/* Copyright (c) 2014 Nordic Semiconductor. All Rights Reserved.
*
* The information contained herein is property of Nordic Semiconductor ASA.
* Terms and conditions of usage are described in detail in NORDIC
* SEMICONDUCTOR STANDARD SOFTWARE LICENSE AGREEMENT.
*
* Licensees are granted free, non-transferable use of the information. NO
* WARRANTY of ANY KIND is provided. This heading must NOT be removed from
* the file.
*
*/
/** @file
*
* @defgroup ble_sdk_uart_over_ble_main main.c
* @{
* @ingroup ble_sdk_app_nus_eval
* @brief UART over BLE application main file.
*
* This file contains the source code for a sample application that uses the Nordic UART service.
* This application uses the @ref srvlib_conn_params module.
*/
#include <stdint.h>
#include <string.h>
#include "nordic_common.h"
#include "nrf.h"
#include "nrf51_bitfields.h"
#include "ble_hci.h"
#include "ble_advdata.h"
#include "ble_advertising.h"
#include "ble_conn_params.h"
#include "softdevice_handler.h"
#include "app_timer.h"
#include "app_button.h"
#include "ble_nus.h"
#include "app_uart.h"
#include "app_util_platform.h"
#include "bsp.h"
#include "bsp_btn_ble.h"
#include <stdbool.h>
#include <stdint.h>
#include <stdio.h>
#include "nrf.h"
//#include <core.h>
#include "nrf_adc.h"
#include "boards.h"
#include "app_uart.h"
#include "app_error.h"
#include <stdbool.h>
#include "nrf_gpiote.h"
#include "nrf_gpio.h"
#include "nrf_drv_gpiote.h"
#include "nrf_delay.h"
#include "app_timer.h"
//#include "app_pwm.h"
#include "app_uart.h"
#include "app_util_platform.h"
#include "boards.h"
#include "pstorage.h"
#include "pstorage_platform.h"
#define IS_SRVC_CHANGED_CHARACT_PRESENT 0 /**< Include the service_changed characteristic. If not enabled, the server's database cannot be changed for the lifetime of the device. */
#define DEVICE_NAME "Nordic_UART" /**< Name of device. Will be included in the advertising data. */
#define NUS_SERVICE_UUID_TYPE BLE_UUID_TYPE_VENDOR_BEGIN /**< UUID type for the Nordic UART Service (vendor specific). */
#define APP_ADV_INTERVAL 64 /**< The advertising interval (in units of 0.625 ms. This value corresponds to 40 ms). */
#define APP_ADV_TIMEOUT_IN_SECONDS 180 /**< The advertising timeout (in units of seconds). */
#define APP_TIMER_PRESCALER 0 /**< Value of the RTC1 PRESCALER register. */
#define APP_TIMER_MAX_TIMERS (2 + BSP_APP_TIMERS_NUMBER) /**< Maximum number of simultaneously created timers. */
#define APP_TIMER_OP_QUEUE_SIZE 4 /**< Size of timer operation queues. */
#define MIN_CONN_INTERVAL MSEC_TO_UNITS(20, UNIT_1_25_MS) /**< Minimum acceptable connection interval (20 ms), Connection interval uses 1.25 ms units. */
#define MAX_CONN_INTERVAL MSEC_TO_UNITS(75, UNIT_1_25_MS) /**< Maximum acceptable connection interval (75 ms), Connection interval uses 1.25 ms units. */
#define SLAVE_LATENCY 0 /**< Slave latency. */
#define CONN_SUP_TIMEOUT MSEC_TO_UNITS(4000, UNIT_10_MS) /**< Connection supervisory timeout (4 seconds), Supervision Timeout uses 10 ms units. */
#define FIRST_CONN_PARAMS_UPDATE_DELAY APP_TIMER_TICKS(5000, APP_TIMER_PRESCALER) /**< Time from initiating event (connect or start of notification) to first time sd_ble_gap_conn_param_update is called (5 seconds). */
#define NEXT_CONN_PARAMS_UPDATE_DELAY APP_TIMER_TICKS(30000, APP_TIMER_PRESCALER) /**< Time between each call to sd_ble_gap_conn_param_update after the first call (30 seconds). */
#define MAX_CONN_PARAMS_UPDATE_COUNT 3 /**< Number of attempts before giving up the connection parameter negotiation. */
#define START_STRING "Start...\n" /**< The string that will be sent over the UART when the application starts. */
#define DEAD_BEEF 0xDEADBEEF /**< Value used as error code on stack dump, can be used to identify stack location on stack unwind. */
#define UART_TX_BUF_SIZE 256 /**< UART TX buffer size. */
#define UART_RX_BUF_SIZE 256 /**< UART RX buffer size. */
static ble_nus_t m_nus; /**< Structure to identify the Nordic UART Service. */
static uint16_t m_conn_handle = BLE_CONN_HANDLE_INVALID; /**< Handle of the current connection. */
static ble_uuid_t m_adv_uuids[] = {{BLE_UUID_NUS_SERVICE, NUS_SERVICE_UUID_TYPE}}; /**< Universally unique service identifier. */
#define ENABLE_DEBUG_LOG_SUPPORT
/////////////******x,y,z axis***///////
uint16_t adc_result = 0;//this for x-axis
uint16_t adc2_result=0 ;//this for y-axis
uint16_t adc3_result=0 ;//this for z-axis
/**@brief Function for assert macro callback.
*
* @details This function will be called in case of an assert in the SoftDevice.
*
* @warning This handler is an example only and does not fit a final product. You need to analyse
* how your product is supposed to react in case of Assert.
* @warning On assert from the SoftDevice, the system can only recover on reset.
*
* @param[in] line_num Line number of the failing ASSERT call.
* @param[in] p_file_name File name of the failing ASSERT call.
*/
void assert_nrf_callback(uint16_t line_num, const uint8_t * p_file_name)
{
app_error_handler(DEAD_BEEF, line_num, p_file_name);
}
/**@brief Function for the GAP initialization.
*
* @details This function will set up all the necessary GAP (Generic Access Profile) parameters of
* the device. It also sets the permissions and appearance.
*/
static void gap_params_init(void)
{
uint32_t err_code;
ble_gap_conn_params_t gap_conn_params;
ble_gap_conn_sec_mode_t sec_mode;
BLE_GAP_CONN_SEC_MODE_SET_OPEN(&sec_mode);
err_code = sd_ble_gap_device_name_set(&sec_mode,
(const uint8_t *) DEVICE_NAME,
strlen(DEVICE_NAME));
APP_ERROR_CHECK(err_code);
memset(&gap_conn_params, 0, sizeof(gap_conn_params));
gap_conn_params.min_conn_interval = MIN_CONN_INTERVAL;
gap_conn_params.max_conn_interval = MAX_CONN_INTERVAL;
gap_conn_params.slave_latency = SLAVE_LATENCY;
gap_conn_params.conn_sup_timeout = CONN_SUP_TIMEOUT;
err_code = sd_ble_gap_ppcp_set(&gap_conn_params);
APP_ERROR_CHECK(err_code);
}
/**@brief Function for handling the data from the Nordic UART Service.
*
* @details This function will process the data received from the Nordic UART BLE Service and send
* it to the UART module.
*
* @param[in] p_nus Nordic UART Service structure.
* @param[in] p_data Data to be send to UART module.
* @param[in] length Length of the data.
*/
/**@snippet [Handling the data received over BLE] */
static void nus_data_handler(ble_nus_t * p_nus, uint8_t * p_data, uint16_t length)
{
for (uint32_t i = 0; i < length; i++)
{
while(app_uart_put(p_data[i]) != NRF_SUCCESS);
}
while(app_uart_put('\n') != NRF_SUCCESS);
}
/**@snippet [Handling the data received over BLE] */
/**@brief Function for initializing services that will be used by the application.
*/
static void services_init(void)
{
uint32_t err_code;
ble_nus_init_t nus_init;
memset(&nus_init, 0, sizeof(nus_init));
nus_init.data_handler = nus_data_handler;
err_code = ble_nus_init(&m_nus, &nus_init);
APP_ERROR_CHECK(err_code);
}
/**@brief Function for handling an event from the Connection Parameters Module.
*
* @details This function will be called for all events in the Connection Parameters Module
* which are passed to the application.
*
* @note All this function does is to disconnect. This could have been done by simply setting
* the disconnect_on_fail config parameter, but instead we use the event handler
* mechanism to demonstrate its use.
*
* @param[in] p_evt Event received from the Connection Parameters Module.
*/
static void on_conn_params_evt(ble_conn_params_evt_t * p_evt)
{
uint32_t err_code;
if(p_evt->evt_type == BLE_CONN_PARAMS_EVT_FAILED)
{
err_code = sd_ble_gap_disconnect(m_conn_handle, BLE_HCI_CONN_INTERVAL_UNACCEPTABLE);
APP_ERROR_CHECK(err_code);
}
}
/**@brief Function for handling errors from the Connection Parameters module.
*
* @param[in] nrf_error Error code containing information about what went wrong.
*/
static void conn_params_error_handler(uint32_t nrf_error)
{
APP_ERROR_HANDLER(nrf_error);
}
/**@brief Function for initializing the Connection Parameters module.
*/
static void conn_params_init(void)
{
uint32_t err_code;
ble_conn_params_init_t cp_init;
memset(&cp_init, 0, sizeof(cp_init));
cp_init.p_conn_params = NULL;
cp_init.first_conn_params_update_delay = FIRST_CONN_PARAMS_UPDATE_DELAY;
cp_init.next_conn_params_update_delay = NEXT_CONN_PARAMS_UPDATE_DELAY;
cp_init.max_conn_params_update_count = MAX_CONN_PARAMS_UPDATE_COUNT;
cp_init.start_on_notify_cccd_handle = BLE_GATT_HANDLE_INVALID;
cp_init.disconnect_on_fail = false;
cp_init.evt_handler = on_conn_params_evt;
cp_init.error_handler = conn_params_error_handler;
err_code = ble_conn_params_init(&cp_init);
APP_ERROR_CHECK(err_code);
}
/**@brief Function for putting the chip into sleep mode.
*
* @note This function will not return.
*/
static void sleep_mode_enter(void)
{
uint32_t err_code = bsp_indication_set(BSP_INDICATE_IDLE);
APP_ERROR_CHECK(err_code);
// Prepare wakeup buttons.
err_code = bsp_btn_ble_sleep_mode_prepare();
APP_ERROR_CHECK(err_code);
// Go to system-off mode (this function will not return; wakeup will cause a reset).
err_code = sd_power_system_off();
APP_ERROR_CHECK(err_code);
}
/**@brief Function for handling advertising events.
*
* @details This function will be called for advertising events which are passed to the application.
*
* @param[in] ble_adv_evt Advertising event.
*/
static void on_adv_evt(ble_adv_evt_t ble_adv_evt)
{
uint32_t err_code;
switch (ble_adv_evt)
{
case BLE_ADV_EVT_FAST:
err_code = bsp_indication_set(BSP_INDICATE_ADVERTISING);
APP_ERROR_CHECK(err_code);
break;
case BLE_ADV_EVT_IDLE:
sleep_mode_enter();
break;
default:
break;
}
}
/**@brief Function for the Application's S110 SoftDevice event handler.
*
* @param[in] p_ble_evt S110 SoftDevice event.
*/
static void on_ble_evt(ble_evt_t * p_ble_evt)
{
uint32_t err_code;
switch (p_ble_evt->header.evt_id)
{
case BLE_GAP_EVT_CONNECTED:
err_code = bsp_indication_set(BSP_INDICATE_CONNECTED);
APP_ERROR_CHECK(err_code);
m_conn_handle = p_ble_evt->evt.gap_evt.conn_handle;
break;
case BLE_GAP_EVT_DISCONNECTED:
err_code = bsp_indication_set(BSP_INDICATE_IDLE);
APP_ERROR_CHECK(err_code);
m_conn_handle = BLE_CONN_HANDLE_INVALID;
break;
case BLE_GAP_EVT_SEC_PARAMS_REQUEST:
// Pairing not supported
err_code = sd_ble_gap_sec_params_reply(m_conn_handle, BLE_GAP_SEC_STATUS_PAIRING_NOT_SUPP, NULL, NULL);
APP_ERROR_CHECK(err_code);
break;
case BLE_GATTS_EVT_SYS_ATTR_MISSING:
// No system attributes have been stored.
err_code = sd_ble_gatts_sys_attr_set(m_conn_handle, NULL, 0, 0);
APP_ERROR_CHECK(err_code);
break;
default:
// No implementation needed.
break;
}
}
/**@brief Function for dispatching a S110 SoftDevice event to all modules with a S110 SoftDevice
* event handler.
*
* @details This function is called from the S110 SoftDevice event interrupt handler after a S110
* SoftDevice event has been received.
*
* @param[in] p_ble_evt S110 SoftDevice event.
*/
static void ble_evt_dispatch(ble_evt_t * p_ble_evt)
{
ble_conn_params_on_ble_evt(p_ble_evt);
ble_nus_on_ble_evt(&m_nus, p_ble_evt);
on_ble_evt(p_ble_evt);
ble_advertising_on_ble_evt(p_ble_evt);
bsp_btn_ble_on_ble_evt(p_ble_evt);
}
/**@brief Function for the S110 SoftDevice initialization.
*
* @details This function initializes the S110 SoftDevice and the BLE event interrupt.
*/
static void ble_stack_init(void)
{
uint32_t err_code;
// Initialize SoftDevice.
SOFTDEVICE_HANDLER_INIT(NRF_CLOCK_LFCLKSRC_XTAL_20_PPM, NULL);
// Enable BLE stack.
ble_enable_params_t ble_enable_params;
memset(&ble_enable_params, 0, sizeof(ble_enable_params));
#ifdef S130
ble_enable_params.gatts_enable_params.attr_tab_size = BLE_GATTS_ATTR_TAB_SIZE_DEFAULT;
#endif
ble_enable_params.gatts_enable_params.service_changed = IS_SRVC_CHANGED_CHARACT_PRESENT;
err_code = sd_ble_enable(&ble_enable_params);
APP_ERROR_CHECK(err_code);
// Subscribe for BLE events.
err_code = softdevice_ble_evt_handler_set(ble_evt_dispatch);
APP_ERROR_CHECK(err_code);
}
/**@brief Function for handling events from the BSP module.
*
* @param[in] event Event generated by button press.
*/
void bsp_event_handler(bsp_event_t event)
{
uint32_t err_code;
switch (event)
{
case BSP_EVENT_SLEEP:
sleep_mode_enter();
break;
case BSP_EVENT_DISCONNECT:
err_code = sd_ble_gap_disconnect(m_conn_handle, BLE_HCI_REMOTE_USER_TERMINATED_CONNECTION);
if (err_code != NRF_ERROR_INVALID_STATE)
{
APP_ERROR_CHECK(err_code);
}
break;
case BSP_EVENT_WHITELIST_OFF:
err_code = ble_advertising_restart_without_whitelist();
if (err_code != NRF_ERROR_INVALID_STATE)
{
APP_ERROR_CHECK(err_code);
}
break;
default:
break;
}
}
/**@brief Function for handling app_uart events.
*
* @details This function will receive a single character from the app_uart module and append it to
* a string. The string will be be sent over BLE when the last character received was a
* 'new line' i.e '\n' (hex 0x0D) or if the string has reached a length of
* @ref NUS_MAX_DATA_LENGTH.
*/
/**@snippet [Handling the data received over UART] */
void uart_event_handle(app_uart_evt_t * p_event)
{
static uint8_t data_array[BLE_NUS_MAX_DATA_LEN];
static uint8_t index = 0;
uint32_t err_code;
switch (p_event->evt_type)
{
case APP_UART_DATA_READY:
UNUSED_VARIABLE(app_uart_get(&data_array[index]));
index++;
if ((data_array[index - 1] == '\n') || (index >= (BLE_NUS_MAX_DATA_LEN)))
{
err_code = ble_nus_string_send(&m_nus, data_array, index);
if (err_code != NRF_ERROR_INVALID_STATE)
{
APP_ERROR_CHECK(err_code);
}
index = 0;
}
break;
case APP_UART_COMMUNICATION_ERROR:
APP_ERROR_HANDLER(p_event->data.error_communication);
break;
case APP_UART_FIFO_ERROR:
APP_ERROR_HANDLER(p_event->data.error_code);
break;
default:
break;
}
}
/**@snippet [Handling the data received over UART] */
/**@brief Function for initializing the UART module.
*/
/**@snippet [UART Initialization] */
static void uart_init(void)
{
uint32_t err_code;
const app_uart_comm_params_t comm_params =
{
RX_PIN_NUMBER,
TX_PIN_NUMBER,
RTS_PIN_NUMBER,
CTS_PIN_NUMBER,
APP_UART_FLOW_CONTROL_ENABLED,
false,
UART_BAUDRATE_BAUDRATE_Baud38400
};
APP_UART_FIFO_INIT( &comm_params,
UART_RX_BUF_SIZE,
UART_TX_BUF_SIZE,
uart_event_handle,
APP_IRQ_PRIORITY_LOW,
err_code);
APP_ERROR_CHECK(err_code);
}
/**@snippet [UART Initialization] */
/**@brief Function for initializing the Advertising functionality.
*/
static void advertising_init(void)
{
uint32_t err_code;
ble_advdata_t advdata;
ble_advdata_t scanrsp;
// Build advertising data struct to pass into @ref ble_advertising_init.
memset(&advdata, 0, sizeof(advdata));
advdata.name_type = BLE_ADVDATA_FULL_NAME;
advdata.include_appearance = false;
advdata.flags = BLE_GAP_ADV_FLAGS_LE_ONLY_LIMITED_DISC_MODE;
memset(&scanrsp, 0, sizeof(scanrsp));
scanrsp.uuids_complete.uuid_cnt = sizeof(m_adv_uuids) / sizeof(m_adv_uuids[0]);
scanrsp.uuids_complete.p_uuids = m_adv_uuids;
ble_adv_modes_config_t options = {0};
options.ble_adv_fast_enabled = BLE_ADV_FAST_ENABLED;
options.ble_adv_fast_interval = APP_ADV_INTERVAL;
options.ble_adv_fast_timeout = APP_ADV_TIMEOUT_IN_SECONDS;
err_code = ble_advertising_init(&advdata, &scanrsp, &options, on_adv_evt, NULL);
APP_ERROR_CHECK(err_code);
}
/**@brief Function for initializing buttons and leds.
*
* @param[out] p_erase_bonds Will be true if the clear bonding button was pressed to wake the application up.
*/
static void buttons_leds_init(bool * p_erase_bonds)
{
bsp_event_t startup_event;
uint32_t err_code = bsp_init(BSP_INIT_LED | BSP_INIT_BUTTONS,
APP_TIMER_TICKS(100, APP_TIMER_PRESCALER),
bsp_event_handler);
APP_ERROR_CHECK(err_code);
err_code = bsp_btn_ble_init(NULL, &startup_event);
APP_ERROR_CHECK(err_code);
*p_erase_bonds = (startup_event == BSP_EVENT_CLEAR_BONDING_DATA);
}
/**
* @brief ADC initialization.
*/
void adc1_config(void)
{
uint16_t adc_result=0;
uint16_t x_out;
double x_val;
NRF_ADC->INTENSET =(ADC_INTENSET_END_Disabled << ADC_INTENSET_END_Pos);
NRF_ADC->CONFIG =(ADC_CONFIG_EXTREFSEL_None << ADC_CONFIG_EXTREFSEL_Pos) /* Bits 17..16 : ADC external reference pin selection. */
| (ADC_CONFIG_PSEL_AnalogInput0 << ADC_CONFIG_PSEL_Pos) /*!< Use analog input 0 as analog input. */
| (ADC_CONFIG_REFSEL_VBG << ADC_CONFIG_REFSEL_Pos) /*!< Use internal 1.2V bandgap voltage as reference for conversion. */
| (ADC_CONFIG_INPSEL_AnalogInputOneThirdPrescaling << ADC_CONFIG_INPSEL_Pos) /*!< Analog input specified by PSEL with no prescaling used as input for the conversion. */
| (ADC_CONFIG_RES_10bit << ADC_CONFIG_RES_Pos) ;
NRF_ADC->ENABLE=ADC_ENABLE_ENABLE_Enabled;
NRF_ADC->TASKS_START =1;
while(!NRF_ADC->EVENTS_END)
{}
NRF_ADC->EVENTS_END =0;
adc_result = NRF_ADC->RESULT;
x_out=adc_result;
NRF_ADC->TASKS_STOP =1;
x_val = ( ( ( (x_out * 3.3) / 1024 ) - 1.6 ) / 0.33 );
}
void adc2_config(void)
{
uint16_t adc1_result=0;
uint16_t y_out;
double y_val;
NRF_ADC->INTENSET =(ADC_INTENSET_END_Disabled << ADC_INTENSET_END_Pos);
NRF_ADC->CONFIG =(ADC_CONFIG_EXTREFSEL_None << ADC_CONFIG_EXTREFSEL_Pos) /* Bits 17..16 : ADC external reference pin selection. */
| (ADC_CONFIG_PSEL_AnalogInput1 << ADC_CONFIG_PSEL_Pos) /*!< Use analog input 1 as analog input. */
| (ADC_CONFIG_REFSEL_VBG << ADC_CONFIG_REFSEL_Pos) /*!< Use internal 1.2V bandgap voltage as reference for conversion. */
| (ADC_CONFIG_INPSEL_AnalogInputOneThirdPrescaling << ADC_CONFIG_INPSEL_Pos) /*!< Analog input specified by PSEL with no prescaling used as input for the conversion. */
| (ADC_CONFIG_RES_10bit << ADC_CONFIG_RES_Pos) ;
NRF_ADC->ENABLE=ADC_ENABLE_ENABLE_Enabled;
NRF_ADC->TASKS_START =1;
while(!NRF_ADC->EVENTS_END)
{}
NRF_ADC->EVENTS_END =0;
adc1_result = NRF_ADC->RESULT;
y_out=adc1_result;
NRF_ADC->TASKS_STOP =1;
y_val = ( ( ( (y_out * 3.3) / 1024 ) - 1.6 ) / 0.33 );
}
void adc3_config(void)
{
uint16_t adc2_result=0;
uint32_t z_out;
double z_val;
NRF_ADC->INTENSET =(ADC_INTENSET_END_Disabled << ADC_INTENSET_END_Pos);
NRF_ADC->CONFIG =(ADC_CONFIG_EXTREFSEL_None << ADC_CONFIG_EXTREFSEL_Pos) /* Bits 17..16 : ADC external reference pin selection. */
| (ADC_CONFIG_PSEL_AnalogInput2 << ADC_CONFIG_PSEL_Pos) /*!< Use analog input 2 as analog input. */
| (ADC_CONFIG_REFSEL_VBG << ADC_CONFIG_REFSEL_Pos) /*!< Use internal 1.2V bandgap voltage as reference for conversion. */
| (ADC_CONFIG_INPSEL_AnalogInputOneThirdPrescaling << ADC_CONFIG_INPSEL_Pos) /*!< Analog input specified by PSEL with no prescaling used as input for the conversion. */
| (ADC_CONFIG_RES_10bit << ADC_CONFIG_RES_Pos) ;
NRF_ADC->ENABLE=ADC_ENABLE_ENABLE_Enabled;
NRF_ADC->TASKS_START =1;
while(!NRF_ADC->EVENTS_END)
{}
NRF_ADC->EVENTS_END =0;
adc2_result = NRF_ADC->RESULT;
z_out=adc2_result;
NRF_ADC->TASKS_STOP =1;
z_val = ( ( ( (z_out * 3.3) / 1024 ) - 1.6 ) / 0.33 );
}
//////////////****Temperature sensor***/////
/*@LM35
pin description Controller pin
1 VCC(5V) 5v
2 Vout Analoginput4(P0.03 ,AIN4)
3 GND
*/
//////////////////******LM35*****/////////////
/* @LM35 Temperature Sensor
GPIO pin Decription
*/
void Temperature_LM35(void)
{
uint16_t adc4_result=0;
NRF_ADC->INTENSET =(ADC_INTENSET_END_Disabled << ADC_INTENSET_END_Pos);
NRF_ADC->CONFIG =(ADC_CONFIG_EXTREFSEL_None << ADC_CONFIG_EXTREFSEL_Pos) /* Bits 17..16 : ADC external reference pin selection. */
| (ADC_CONFIG_PSEL_AnalogInput3 << ADC_CONFIG_PSEL_Pos) /*!< Use analog input 1 as analog input. */
| (ADC_CONFIG_REFSEL_VBG << ADC_CONFIG_REFSEL_Pos) /*!< Use internal 1.2V bandgap voltage as reference for conversion. */
| (ADC_CONFIG_INPSEL_AnalogInputOneThirdPrescaling << ADC_CONFIG_INPSEL_Pos) /*!< Analog input specified by PSEL with no prescaling used as input for the conversion. */
| (ADC_CONFIG_RES_10bit << ADC_CONFIG_RES_Pos) ;
NRF_ADC->ENABLE=ADC_ENABLE_ENABLE_Enabled;
NRF_ADC->TASKS_START =1;
while(!NRF_ADC->EVENTS_END)
{}
NRF_ADC->EVENTS_END =0;
adc4_result = NRF_ADC->RESULT;
NRF_ADC->TASKS_STOP =1;
}
//app_trace_log(); //log ADC reult on UART
// ble_nus_string_send(&m_nus, &adc_result[0] , 2);
//void adc_config(void)
//{
// const nrf_adc_config_t nrf_adc_config = NRF_ADC_CONFIG_DEFAULT;
// // Initialize and configure ADC
// nrf_adc_configure( (nrf_adc_config_t *)&nrf_adc_config);
// nrf_adc_input_select(NRF_ADC_CONFIG_INPUT_2);
// nrf_adc_int_enable(ADC_INTENSET_END_Enabled << ADC_INTENSET_END_Pos);
// NVIC_SetPriority(ADC_IRQn, NRF_APP_PRIORITY_HIGH);
// NVIC_EnableIRQ(ADC_IRQn);
//}
/**@brief Function for placing the application in low power state while waiting for events.
*/
static void power_manage(void)
{
uint32_t err_code = sd_app_evt_wait();
APP_ERROR_CHECK(err_code);
}
///////////////////////////////////////////ULTRASONIC SENSOR**********//////////////////
// counter
static volatile uint32_t tCount = 0;
// HC-SR04 Trigger - P0.01
uint32_t pinTrig = 1;
// HC-SR04 Echo - P0.02
uint32_t pinEcho = 2;
// count to us (micro seconds) conversion factor
// set in start_timer()
static volatile float countToUs = 1;
// get distance measurement from HC-SR04:
// Send a 10us HIGH pulse on the Trigger pin.
// The sensor sends out a “sonic burst” of 8 cycles.
// Listen to the Echo pin, and the duration of the next HIGH
// signal will give you the time taken by the sound to go back
// and forth from sensor to target.
// returns true only if a valid distance is obtained
bool getDistance(float* dist)
{
// send 12us trigger pulse
// _
// __| |__
nrf_gpio_pin_clear(pinTrig);
nrf_delay_us(20);
nrf_gpio_pin_set(pinTrig);
nrf_delay_us(12);
nrf_gpio_pin_clear(pinTrig);
nrf_delay_us(20);
// listen for echo and time it
// ____________
// _____| |___
// wait till Echo pin goes high
while(!nrf_gpio_pin_read(pinEcho));
// reset counter
tCount = 0;
// wait till Echo pin goes low
while(nrf_gpio_pin_read(pinEcho));
// calculate duration in us
float duration = countToUs*tCount;
// dist = duration * speed of sound * 1/2
// dist in cm = duration in us * 10^-6 * 340.29 * 100 * 1/2
float distance = duration*0.017;
// check value
if(distance < 400.0) {
// save
*dist = distance;
return true;
}
else {
return false;
}
}
// set up and start Timer1
void start_timer(void)
{
NRF_TIMER1->MODE = TIMER_MODE_MODE_Timer;
NRF_TIMER1->TASKS_CLEAR = 1;
// set prescalar n
// f = 16 MHz / 2^(n)
uint8_t prescaler = 0;
NRF_TIMER1->PRESCALER = prescaler;
NRF_TIMER1->BITMODE = TIMER_BITMODE_BITMODE_16Bit;
// 16 MHz clock generates timer tick every 1/(16000000) s = 62.5 nano s
// With compare enabled, the interrupt is fired every: 62.5 * comp1 nano s
// = 0.0625*comp1 micro seconds
// multiply this by 2^(prescalar)
uint16_t comp1 = 500;
// set compare
NRF_TIMER1->CC[1] = comp1;
// set conversion factor
countToUs = 0.0625*comp1*(1 << prescaler);
printf("timer tick = %f us\n", countToUs);
// enable compare 1
NRF_TIMER1->INTENSET =
(TIMER_INTENSET_COMPARE1_Enabled << TIMER_INTENSET_COMPARE1_Pos);
// use the shorts register to clear compare 1
NRF_TIMER1->SHORTS = (TIMER_SHORTS_COMPARE1_CLEAR_Enabled <<
TIMER_SHORTS_COMPARE1_CLEAR_Pos);
// enable IRQ
NVIC_EnableIRQ(TIMER1_IRQn);
// start timer
NRF_TIMER1->TASKS_START = 1;
}
// Timer 1 IRQ handler
// just increment count
void TIMER1_IRQHandler(void)
{
if (NRF_TIMER1->EVENTS_COMPARE[1] &&
NRF_TIMER1->INTENSET & TIMER_INTENSET_COMPARE1_Msk) {
// clear compare register event
NRF_TIMER1->EVENTS_COMPARE[1] = 0;
// increment count
tCount++;
}
}
/**@brief Application main function.
*/
int main(void)
{
///new application////
char start_string;
uint32_t err_code;
//NRF_TEMP->TASKS_START;
// set up timers
APP_TIMER_INIT(0, 4, 4, false);
// app_trace_init(); //for logging ADC result on UART
// initlialize BLE
ble_stack_init();
gap_params_init();
services_init();
advertising_init();
conn_params_init();
err_code = ble_advertising_start(BLE_ADV_MODE_FAST);
APP_ERROR_CHECK(err_code);
// intialize UART
uart_init();
start_timer();
// prints to serial port
printf("starting...\n");
// set up HC-SR04 pins
nrf_gpio_pin_dir_set(pinTrig, NRF_GPIO_PIN_DIR_OUTPUT);
nrf_gpio_pin_dir_set(pinEcho, NRF_GPIO_PIN_DIR_INPUT);
// main loop:
while(1) {
//check the movement by ADXL sensor////
// get HC-SR04 distance
float dist;
if(getDistance(&dist)) {
// enable to print to serial port
//printf("dist = %f cm\n", dist);
// send distance via NUS
uint8_t str[4];
sprintf((char*)str, "%f cm", dist);
ble_nus_string_send(&m_nus, str, strlen((char*)str));
}
// delay
nrf_delay_ms(250);
// uint32_t err_code;
// bool erase_bonds;
// uint8_t start_string[] = START_STRING;
//
// // Initialize.
// APP_TIMER_INIT(APP_TIMER_PRESCALER, APP_TIMER_MAX_TIMERS, APP_TIMER_OP_QUEUE_SIZE, false);
// uart_init();
// buttons_leds_init(&erase_bonds);
// ble_stack_init();
// gap_params_init();
// services_init();
// advertising_init();
// conn_params_init();
//
//printf("%s",start_string);
// err_code = ble_advertising_start(BLE_ADV_MODE_FAST);
// APP_ERROR_CHECK(err_code);
//
// // Enter main loop.
// for (;;)
// {
// power_manage();
// }
}
}
/**
* @}
*/
Thanks.
I'm still not quite sure what SDK you are working with here.
But I can't see any errors so far. Atleast not without the sensor to test with.
If you want to send the values over BLE, can't you use the ble_nus_string_send() function?
I can see you've already used it in your code.
Cheers.
Thanks.
I'm using SDK 9.0.0 .
how can i use that ble_nus_string_send() function in my code?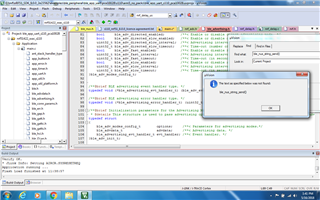 here u can see
here u can see
is it correct way to send value??