Hi!
I am trying to interface LIS3DH module (https://www.adafruit.com/product/2809) with nRF52 DK, SDK 11, via i2c/spi. I tested on Arduino UNO & it gave x,y,z values. So, I decided to write nrf driver for LIS3DH using Adafruit LIS3DH driver(https://github.com/adafruit/Adafruit_LIS3DH/) but I am getting errors like i2c begin & how/what to write to control registers to read data again.
Please suggest me how to write driver or if general LIS3DH driver is available then reply ASAP.
#include <LIS3DH.h>
#include "nrf_drv_twi.h"
#include "nrf_delay.h"
/** Sensor types */
typedef enum
{
SENSOR_TYPE_ACCELEROMETER = (1), /**< Gravity + linear acceleration */
SENSOR_TYPE_MAGNETIC_FIELD = (2),
SENSOR_TYPE_ORIENTATION = (3),
SENSOR_TYPE_GYROSCOPE = (4),
SENSOR_TYPE_LIGHT = (5),
SENSOR_TYPE_PRESSURE = (6),
SENSOR_TYPE_PROXIMITY = (8),
SENSOR_TYPE_GRAVITY = (9),
SENSOR_TYPE_LINEAR_ACCELERATION = (10), /**< Acceleration not including gravity */
SENSOR_TYPE_ROTATION_VECTOR = (11),
SENSOR_TYPE_RELATIVE_HUMIDITY = (12),
SENSOR_TYPE_AMBIENT_TEMPERATURE = (13),
SENSOR_TYPE_VOLTAGE = (15),
SENSOR_TYPE_CURRENT = (16),
SENSOR_TYPE_COLOR = (17)
} sensors_type_t;
/** struct sensors_vec_s is used to return a vector in a common format. */
typedef struct {
float v[3];
struct {
float x;
float y;
float z;
float roll; /**< Rotation around the longitudinal axis (the plane body, 'X axis'). Roll is positive and increasing when moving downward. -90�<=roll<=90� */
float pitch; /**< Rotation around the lateral axis (the wing span, 'Y axis'). Pitch is positive and increasing when moving upwards. -180�<=pitch<=180�) */
float heading; /**< Angle between the longitudinal axis (the plane body) and magnetic north, measured clockwise when viewing from the top of the device. 0-359� */
int8_t status;
uint8_t reserved[3];
} sensors_vec_t;
/** struct sensors_color_s is used to return color data in a common format. */
typedef struct {
float c[3];
/* RGB color space */
float r; /**< Red component */
float g; /**< Green component */
float b; /**< Blue component */
uint32_t rgba; /**< 24-bit RGBA value */
} sensors_color_t;
/* Sensor event (36 bytes) */
/** struct sensor_event_s is used to provide a single sensor event in a common format. */
typedef struct
{
int32_t version; /**< must be sizeof(struct sensors_event_t) */
int32_t sensor_id; /**< unique sensor identifier */
int32_t type; /**< sensor type */
int32_t reserved0; /**< reserved */
int32_t timestamp; /**< time is in milliseconds */
float data[4];
float temperature; /**< temperature is in degrees centigrade (Celsius) */
float distance; /**< distance in centimeters */
float light; /**< light in SI lux units */
float pressure; /**< pressure in hectopascal (hPa) */
float relative_humidity; /**< relative humidity in percent */
float current; /**< current in milliamps (mA) */
float voltage; /**< voltage in volts (V) */
} sensors_event_t;
/* Sensor details (40 bytes) */
/** struct sensor_s is used to describe basic information about a specific sensor. */
typedef struct
{
char name[12]; /**< sensor name */
int32_t version; /**< version of the hardware + driver */
int32_t sensor_id; /**< unique sensor identifier */
int32_t type; /**< this sensor's type (ex. SENSOR_TYPE_LIGHT) */
float max_value; /**< maximum value of this sensor's value in SI units */
float min_value; /**< minimum value of this sensor's value in SI units */
float resolution; /**< smallest difference between two values reported by this sensor */
int32_t min_delay; /**< min delay in microseconds between events. zero = not a constant rate */
} sensor_t;
typedef enum
{
LIS3DH_RANGE_16_G = 3, // +/- 16g
LIS3DH_RANGE_8_G = 2, // +/- 8g
LIS3DH_RANGE_4_G = 1, // +/- 4g
LIS3DH_RANGE_2_G = 0 // +/- 2g (default value)
} lis3dh_range_t;
typedef enum
{
LIS3DH_AXIS_X = 0x0,
LIS3DH_AXIS_Y = 0x1,
LIS3DH_AXIS_Z = 0x2,
} lis3dh_axis_t;
// These must be defined by the subclass
void enableAutoRange(bool enabled) {};
int16_t readADC(uint8_t a);
void setRange(lis3dh_range_t range);
lis3dh_range_t getRange(void);
void setDataRate(lis3dh_dataRate_t dataRate);
lis3dh_dataRate_t getDataRate(void);
bool getEvent(sensors_event_t *event);
void getSensor(sensor_t *sensor);
uint8_t getOrientation(void);
void setClick(uint8_t c, uint8_t clickthresh, uint8_t timelimit = 10, uint8_t timelatency = 20, uint8_t timewindow = 255);
uint8_t getClick(void);
int16_t x, y, z;
float x_g, y_g, z_g;
uint8_t readRegister8(uint8_t reg);
void writeRegister8(uint8_t reg, uint8_t value);
uint8_t spixfer(uint8_t x = 0xFF);
int32_t _sensorID;
int8_t _i2caddr;
// SPI
int8_t _cs, _mosi, _miso, _sck;
/**************************************************************************/
/*!
@brief Setups the HW (reads coefficients values, etc.)
*/
/**************************************************************************/
bool begin() {
/* Check connection */
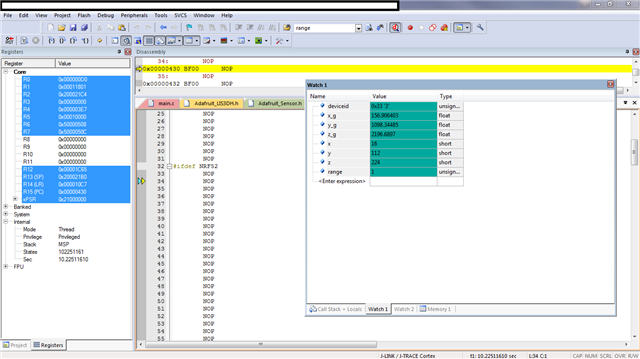
uint8_t deviceid = readRegister8(LIS3DH_REG_WHOAMI);
if (deviceid != 0x33)
{
/* No LIS3DH detected ... return false */
//Serial.println(deviceid, HEX);
return false;
}
// enable all axes, normal mode
writeRegister8(LIS3DH_REG_CTRL1, 0x07);
// 400Hz rate
setDataRate(LIS3DH_DATARATE_400_HZ);
// High res & BDU enabled
writeRegister8(LIS3DH_REG_CTRL4, 0x88);
// DRDY on INT1
writeRegister8(LIS3DH_REG_CTRL3, 0x10);
// Turn on orientation config
//writeRegister8(LIS3DH_REG_PL_CFG, 0x40);
// enable adcs
writeRegister8(LIS3DH_REG_TEMPCFG, 0x80);
/*
for (uint8_t i=0; i<0x30; i++) {
Serial.print("$");
Serial.print(i, HEX); Serial.print(" = 0x");
Serial.println(readRegister8(i), HEX);
}
*/
return true;
}
void read(void) {
// read x y z at once
if (_cs == -1) {
// i2c
nrf_drv_twi_tx(&p_twi_instance,LIS3DH_DEFAULT_ADDRESS,LIS3DH_REG_OUT_X_L,sizeof(LIS3DH_REG_OUT_X_L), true);// PEDO_WRITE(data,6);
nrf_delay_ms(5);
do{
nrf_drv_twi_rx(&p_twi_instance,LIS3DH_DEFAULT_ADDRESS,LIS3DH_REG_OUT_X_L, sizeof(LIS3DH_REG_OUT_X_L), false);
}while(LIS3DH_REG_OUT_X_L[1]!=0x80);
I2Cinterface->requestFrom(_i2caddr, 6);
x = I2Cinterface->read(); x |= ((uint16_t)I2Cinterface->read()) << 8;
y = I2Cinterface->read(); y |= ((uint16_t)I2Cinterface->read()) << 8;
z = I2Cinterface->read(); z |= ((uint16_t)I2Cinterface->read()) << 8;
}
#ifndef __AVR_ATtiny85__
else {
if (_sck == -1)
SPI.beginTransaction(SPISettings(500000, MSBFIRST, SPI_MODE0));
digitalWrite(_cs, LOW);
spixfer(LIS3DH_REG_OUT_X_L | 0x80 | 0x40); // read multiple, bit 7&6 high
x = spixfer(); x |= ((uint16_t)spixfer()) << 8;
y = spixfer(); y |= ((uint16_t)spixfer()) << 8;
z = spixfer(); z |= ((uint16_t)spixfer()) << 8;
digitalWrite(_cs, HIGH);
if (_sck == -1)
SPI.endTransaction(); // release the SPI bus
}
#endif
uint8_t range = getRange();
uint16_t divider = 1;
if (range == LIS3DH_RANGE_16_G) divider = 1365; // different sensitivity at 16g
if (range == LIS3DH_RANGE_8_G) divider = 4096;
if (range == LIS3DH_RANGE_4_G) divider = 8190;
if (range == LIS3DH_RANGE_2_G) divider = 16380;
x_g = (float)x / divider;
y_g = (float)y / divider;
z_g = (float)z / divider;
}
/**************************************************************************/
/*!
@brief Read the auxilary ADC
*/
/**************************************************************************/
int16_t readADC(uint8_t adc) {
if ((adc < 1) || (adc > 3)) return 0;
uint16_t value;
adc--;
uint8_t reg = LIS3DH_REG_OUTADC1_L + adc*2;
if (_cs == -1) {
// i2c
I2Cinterface->beginTransmission(_i2caddr);
I2Cinterface->write(reg | 0x80); // 0x80 for autoincrement
I2Cinterface->endTransmission();
I2Cinterface->requestFrom(_i2caddr, 2);
value = I2Cinterface->read(); value |= ((uint16_t)I2Cinterface->read()) << 8;
}
#ifndef __AVR_ATtiny85__
else {
if (_sck == -1)
SPI.beginTransaction(SPISettings(500000, MSBFIRST, SPI_MODE0));
digitalWrite(_cs, LOW);
spixfer(reg | 0x80 | 0x40); // read multiple, bit 7&6 high
value = spixfer(); value |= ((uint16_t)spixfer()) << 8;
digitalWrite(_cs, HIGH);
if (_sck == -1)
SPI.endTransaction(); // release the SPI bus
}
#endif
return value;
}
/**************************************************************************/
/*!
@brief Set INT to output for single or double click
*/
/**************************************************************************/
void setClick(uint8_t c, uint8_t clickthresh, uint8_t timelimit, uint8_t timelatency, uint8_t timewindow) {
if (!c) {
//disable int
uint8_t r = readRegister8(LIS3DH_REG_CTRL3);
r &= ~(0x80); // turn off I1_CLICK
writeRegister8(LIS3DH_REG_CTRL3, r);
writeRegister8(LIS3DH_REG_CLICKCFG, 0);
return;
}
// else...
writeRegister8(LIS3DH_REG_CTRL3, 0x80); // turn on int1 click
writeRegister8(LIS3DH_REG_CTRL5, 0x08); // latch interrupt on int1
if (c == 1)
writeRegister8(LIS3DH_REG_CLICKCFG, 0x15); // turn on all axes & singletap
if (c == 2)
writeRegister8(LIS3DH_REG_CLICKCFG, 0x2A); // turn on all axes & doubletap
writeRegister8(LIS3DH_REG_CLICKTHS, clickthresh); // arbitrary
writeRegister8(LIS3DH_REG_TIMELIMIT, timelimit); // arbitrary
writeRegister8(LIS3DH_REG_TIMELATENCY, timelatency); // arbitrary
writeRegister8(LIS3DH_REG_TIMEWINDOW, timewindow); // arbitrary
}
uint8_t getClick(void) {
return readRegister8(LIS3DH_REG_CLICKSRC);
}
/**************************************************************************/
/*!
@brief Sets the g range for the accelerometer
*/
/**************************************************************************/
void setRange(lis3dh_range_t range)
{
uint8_t r = readRegister8(LIS3DH_REG_CTRL4);
r &= ~(0x30);
r |= range << 4;
writeRegister8(LIS3DH_REG_CTRL4, r);
}
/**************************************************************************/
/*!
@brief Sets the g range for the accelerometer
*/
/**************************************************************************/
lis3dh_range_t getRange(void)
{
/* Read the data format register to preserve bits */
return (lis3dh_range_t)((readRegister8(LIS3DH_REG_CTRL4) >> 4) & 0x03);
}
/**************************************************************************/
/*!
@brief Sets the data rate for the LIS3DH (controls power consumption)
*/
/**************************************************************************/
void setDataRate(lis3dh_dataRate_t dataRate)
{
uint8_t ctl1 = readRegister8(LIS3DH_REG_CTRL1);
ctl1 &= ~(0xF0); // mask off bits
ctl1 |= (dataRate << 4);
writeRegister8(LIS3DH_REG_CTRL1, ctl1);
}
/**************************************************************************/
/*!
@brief Sets the data rate for the LIS3DH (controls power consumption)
*/
/**************************************************************************/
lis3dh_dataRate_t getDataRate(void)
{
return (lis3dh_dataRate_t)((readRegister8(LIS3DH_REG_CTRL1) >> 4)& 0x0F);
}
/**************************************************************************/
/*!
@brief Gets the most recent sensor event
*/
/**************************************************************************/
bool getEvent(sensors_event_t *event) {
/* Clear the event */
memset(event, 0, sizeof(sensors_event_t));
event->version = sizeof(sensors_event_t);
event->sensor_id = _sensorID;
event->type = SENSOR_TYPE_ACCELEROMETER;
event->timestamp = 0;
read();
event->acceleration.x = x_g * SENSORS_GRAVITY_STANDARD;
event->acceleration.y = y_g * SENSORS_GRAVITY_STANDARD;
event->acceleration.z = z_g * SENSORS_GRAVITY_STANDARD;
}
/**************************************************************************/
/*!
@brief Gets the sensor_t data
*/
/**************************************************************************/
void getSensor(sensor_t *sensor) {
/* Clear the sensor_t object */
memset(sensor, 0, sizeof(sensor_t));
/* Insert the sensor name in the fixed length char array */
strncpy (sensor->name, "LIS3DH", sizeof(sensor->name) - 1);
sensor->name[sizeof(sensor->name)- 1] = 0;
sensor->version = 1;
sensor->sensor_id = _sensorID;
sensor->type = SENSOR_TYPE_ACCELEROMETER;
sensor->min_delay = 0;
sensor->max_value = 0;
sensor->min_value = 0;
sensor->resolution = 0;
}
/**************************************************************************/
/*!
@brief Low level SPI
*/
/**************************************************************************/
uint8_t spixfer(uint8_t x) {
#ifndef __AVR_ATtiny85__
if (_sck == -1)
return SPI.transfer(x);
// software spi
//Serial.println("Software SPI");
uint8_t reply = 0;
for (int i=7; i>=0; i--) {
reply <<= 1;
digitalWrite(_sck, LOW);
digitalWrite(_mosi, x & (1<<i));
digitalWrite(_sck, HIGH);
if (digitalRead(_miso))
reply |= 1;
}
return reply;
#endif
}
/**************************************************************************/
/*!
@brief Writes 8-bits to the specified destination register
*/
/**************************************************************************/
void writeRegister8(uint8_t reg, uint8_t value) {
if (_cs == -1) {
I2Cinterface->beginTransmission((uint8_t)_i2caddr);
I2Cinterface->write((uint8_t)reg);
I2Cinterface->write((uint8_t)value);
I2Cinterface->endTransmission();
}
#ifndef __AVR_ATtiny85__
else {
if (_sck == -1)
SPI.beginTransaction(SPISettings(500000, MSBFIRST, SPI_MODE0));
digitalWrite(_cs, LOW);
spixfer(reg & ~0x80); // write, bit 7 low
spixfer(value);
digitalWrite(_cs, HIGH);
if (_sck == -1)
SPI.endTransaction(); // release the SPI bus
}
#endif
}
/**************************************************************************/
/*!
@brief Reads 8-bits from the specified register
*/
/**************************************************************************/
uint8_t readRegister8(uint8_t reg) {
uint8_t value;
if (_cs == -1) {
I2Cinterface->beginTransmission(_i2caddr);
I2Cinterface->write((uint8_t)reg);
I2Cinterface->endTransmission();
I2Cinterface->requestFrom(_i2caddr, 1);
value = I2Cinterface->read();
}
#ifndef __AVR_ATtiny85__
else {
if (_sck == -1)
SPI.beginTransaction(SPISettings(500000, MSBFIRST, SPI_MODE0));
digitalWrite(_cs, LOW);
spixfer(reg | 0x80); // read, bit 7 high
value = spixfer(0);
digitalWrite(_cs, HIGH);
if (_sck == -1)
SPI.endTransaction(); // release the SPI bus
}
#endif
return value;
}