
Hii,
I am currently using two nRF52832 SDK boards to implement text message exchange with another nRF52832 SDK board via BLE Mesh SDK 2.0.1.
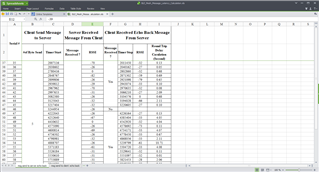
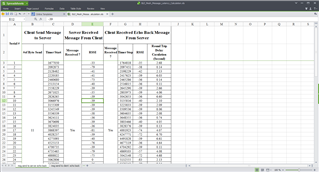
However, when I try to increase the frequency of sending the command the communication seem to choke. and i'm getting Roundtrip Delay higher between client and server.
Roundtrip calcualtion of 5byte send and receive sheet is below
Round trip calcualtion of 11byte send and receive sheet is below
How to reduce round trip delay time please suggest me ASAP.
Thanks,
Nikunj Patidar

