
Hi all,
I develop program code based on nrf-mpu-magnetomter examples. I code the DMP and complied well . However the program is always stay an error when it starts running as below:
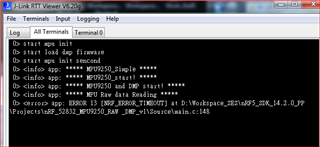
and here is the partial code
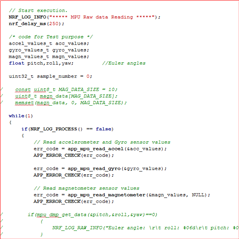
The problem is that the accel and gyro values can be reading after the function of Read magnetometer sensor values was commented.
Not sure the DMP setting caused this or the compass does not initialize properly?
thx your attention.
