Hello.
I almost finish nrf52-quadcopter develop.
I want fly drone with mobile.
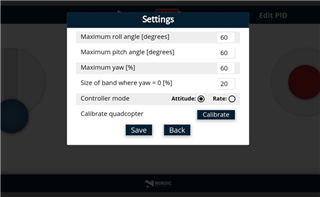
I want to confirm PID value from minum to maxium in mobile.
and I want to confirm your PID value.
Roll - rate
P: I: D:
Roll - attitude
P: I: D:
Pitch - rate
P: I: D:
Pitch - attitude
P: I: D:
Yaw - rate
P: I: D:
Yaw - attitude
P: I: D:
thank you have a nice day