Hello All,
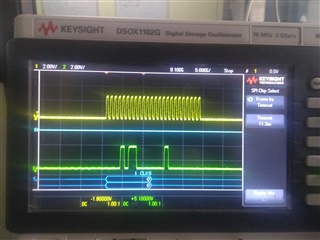
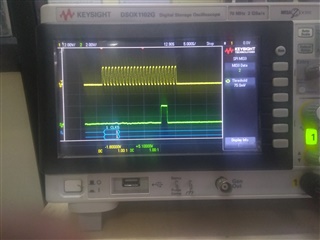
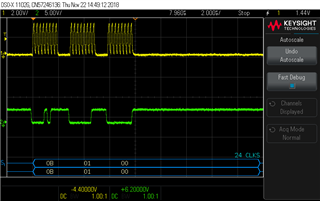
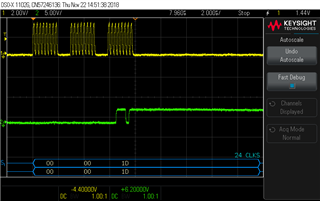
I have connected nRF52840 with ADXL362 over SPI, and try to read/write data on "Power Control register".
The process I follow,
1. Rest ADXL362.
2. Write data 0x02 in "Power Control register" of ADXL362.
2. Read value of "Power Control register" of ADXL362.
But every time I read data form ADXL362 I got 0x00 value.
Logs are attached.
For testing this I have modify SPI test code located at "nRF5_SDK_15.0.0_a53641a\examples\peripheral\spi"
Code is also attached here, will you please guide me, If I did any wrong in SPI configuration?
I am little bit confuse of "tx_buffer_length" & "rx_buffer_length" value passing in nrf_drv_spi_transfer() function.
Does the values of "tx_buffer_length" & "rx_buffer_length" are correct at line no 101 & 118 in main.c file?
Thanks in advance.
<info> app: ######################################################### <info> app: SPI example started. <info> SPIM: Function: nrfx_spim_init, error code: NRF_SUCCESS. <info> app: <---- ADXL325 reset ----> <info> SPIM: Function: spim_xfer, error code: NRF_SUCCESS. <debug> SPIM: Event: NRF_SPIM_EVENT_END. <info> app: Transfer completed. <info> app: 00 00 00 |... <info> app: soft reset <info> app: <--- ADXL325 set power control register ---> <info> SPIM: Function: spim_xfer, error code: NRF_SUCCESS. <info> app: ** 0 0 0 <info> app: 00 00 |.. <info> app: Setting Measeurement Mode - Reg 2D before = 0 <debug> SPIM: Event: NRF_SPIM_EVENT_END. <info> app: Transfer completed. <info> app: 00 00 00 |... <info> SPIM: Function: spim_xfer, error code: NRF_SUCCESS. <debug> SPIM: Event: NRF_SPIM_EVENT_END. <info> app: Transfer completed. <info> app: 00 00 00 |... <info> app: ----------- <info> SPIM: Function: spim_xfer, error code: NRF_SUCCESS. <info> app: ** 0 0 0 <info> app: 00 00 |.. <info> app: , Reg 2D after = 0 <debug> SPIM: Event: NRF_SPIM_EVENT_END. <info> app: Transfer completed. <info> app: 00 00 00 |...
/**
* Copyright (c) 2015 - 2018, Nordic Semiconductor ASA
*
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without modification,
* are permitted provided that the following conditions are met:
*
* 1. Redistributions of source code must retain the above copyright notice, this
* list of conditions and the following disclaimer.
*
* 2. Redistributions in binary form, except as embedded into a Nordic
* Semiconductor ASA integrated circuit in a product or a software update for
* such product, must reproduce the above copyright notice, this list of
* conditions and the following disclaimer in the documentation and/or other
* materials provided with the distribution.
*
* 3. Neither the name of Nordic Semiconductor ASA nor the names of its
* contributors may be used to endorse or promote products derived from this
* software without specific prior written permission.
*
* 4. This software, with or without modification, must only be used with a
* Nordic Semiconductor ASA integrated circuit.
*
* 5. Any software provided in binary form under this license must not be reverse
* engineered, decompiled, modified and/or disassembled.
*
* THIS SOFTWARE IS PROVIDED BY NORDIC SEMICONDUCTOR ASA "AS IS" AND ANY EXPRESS
* OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES
* OF MERCHANTABILITY, NONINFRINGEMENT, AND FITNESS FOR A PARTICULAR PURPOSE ARE
* DISCLAIMED. IN NO EVENT SHALL NORDIC SEMICONDUCTOR ASA OR CONTRIBUTORS BE
* LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
* CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE
* GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION)
* HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT
* OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
#include "nrf_drv_spi.h"
#include "app_util_platform.h"
#include "nrf_gpio.h"
#include "nrf_delay.h"
#include "boards.h"
#include "app_error.h"
#include <string.h>
#include "nrf_log.h"
#include "nrf_log_ctrl.h"
#include "nrf_log_default_backends.h"
#define SPI_INSTANCE 0 /**< SPI instance index. */
static const nrf_drv_spi_t spi = NRF_DRV_SPI_INSTANCE(SPI_INSTANCE); /**< SPI instance. */
static volatile bool spi_xfer_done; /**< Flag used to indicate that SPI instance completed the transfer. */
#define TEST_STRING "Nordic"
static uint8_t m_tx_buf[] = TEST_STRING; /**< TX buffer. */
static uint8_t m_rx_buf[sizeof(TEST_STRING) + 1]; /**< RX buffer. */
static const uint8_t m_length = sizeof(m_tx_buf); /**< Transfer length. */
uint8_t tx[3] = { 0x0B, 0x00, 0x00 };
uint8_t rx[3] = { 0 };
/**
* @brief SPI user event handler.
* @param event
*/
void spi_event_handler(nrf_drv_spi_evt_t const * p_event,
void * p_context)
{
spi_xfer_done = true;
NRF_LOG_INFO("Transfer completed.");
//NRF_LOG_INFO("%d.", p_event->type);
//NRF_LOG_INFO("%d %d %s", p_event->data.done.rx_length, p_event->data.done.tx_length, p_event->data.done.p_tx_buffer);
// if (m_rx_buf[0] != 0)
if (rx[0] != 0)
{
NRF_LOG_INFO(" Received:");
NRF_LOG_HEXDUMP_INFO(m_rx_buf, strlen((const char *)m_rx_buf));
}
NRF_LOG_HEXDUMP_INFO(rx, 3);
}
#define XL362_REG_WRITE 0x0a
#define XL362_REG_READ 0x0b
#define XL362_POWER_CTL 0x2d
#define XL362_SOFT_RESET 0x1f
#define XL362_SOFT_RESET_KEY 0x52
uint8_t adxl362_read_one_reg(uint8_t reg_address)
{
uint8_t tx_buff[3] = {0};
uint8_t rx_buff[3] = {0};
// </CS down> <command byte (0x0A or 0x0B)> <address byte> <data byte> <additional data bytes for multi-byte> � </CS up>
tx_buff[0] = XL362_REG_READ;
tx_buff[1] = reg_address;
tx_buff[2] = 0x00; // dummy byte
APP_ERROR_CHECK(nrf_drv_spi_transfer(&spi, tx_buff, 3, rx_buff, 1));
NRF_LOG_INFO("** %d %d %d", rx[0], rx[1], rx[2]);
NRF_LOG_HEXDUMP_INFO(rx, 2);
return rx_buff[2];
}
void adxl362_write_one_reg(uint8_t reg_address, uint8_t reg_value)
{
uint8_t tx_buff[3] = {0};
uint8_t rx_buff[3] = {0};
// </CS down> <command byte (0x0A or 0x0B)> <address byte> <data byte> <additional data bytes for multi-byte> � </CS up>
tx_buff[0] = XL362_REG_WRITE;
tx_buff[1] = reg_address;
tx_buff[2] = reg_value;
APP_ERROR_CHECK(nrf_drv_spi_transfer(&spi, tx_buff, 3, rx_buff, 3));
// NRF_LOG_INFO("** %d %d %d", rx[0], rx[1], rx[2]);
// NRF_LOG_HEXDUMP_INFO(rx, 2);
}
void adxl362_reset()
{
// soft reset
adxl362_write_one_reg(XL362_SOFT_RESET, XL362_SOFT_RESET_KEY);
// Note: A latency of approximately 0.5 ms is required after soft reset.
nrf_delay_ms(200);
NRF_LOG_INFO("soft reset");
}
void beginMeasure()
{
uint8_t reg_val = 0x0;
// read Reg 2D before modifying for measure mode
reg_val = adxl362_read_one_reg(XL362_POWER_CTL);
NRF_LOG_INFO("Setting Measeurement Mode - Reg 2D before = %d", reg_val);
// turn on measurement mode
uint8_t temp_write = (reg_val | 0x02); // turn on measurement bit in Reg 2D
adxl362_write_one_reg(XL362_POWER_CTL, temp_write);
nrf_delay_ms(10);
//nrf_delay_ms(200);
NRF_LOG_INFO("-----------");
// read Reg 2D before modifying for measure mode
reg_val = adxl362_read_one_reg(XL362_POWER_CTL);
NRF_LOG_INFO(", Reg 2D after = %d", reg_val);
}
int main(void)
{
bsp_board_init(BSP_INIT_LEDS);
APP_ERROR_CHECK(NRF_LOG_INIT(NULL));
NRF_LOG_DEFAULT_BACKENDS_INIT();
NRF_LOG_INFO("#########################################################");
NRF_LOG_INFO("SPI example started.");
nrf_drv_spi_config_t spi_config = NRF_DRV_SPI_DEFAULT_CONFIG;
#if 1
spi_config.ss_pin = NRF_GPIO_PIN_MAP(0,17); //17
spi_config.miso_pin = NRF_GPIO_PIN_MAP(0,23); //23
spi_config.mosi_pin = NRF_GPIO_PIN_MAP(0,21); //21
spi_config.sck_pin = NRF_GPIO_PIN_MAP(0,19); //19
#else
spi_config.ss_pin = SPI_SS_PIN;
spi_config.miso_pin = SPI_MOSI_PIN;
spi_config.mosi_pin = SPI_MISO_PIN;
spi_config.sck_pin = SPI_SCK_PIN;
#endif
spi_config.frequency = NRF_SPIM_FREQ_1M;
// spi_config.bit_order = NRF_DRV_SPI_BIT_ORDER_LSB_FIRST;
// spi_config.irq_priority = NRFX_SPIM_DEFAULT_CONFIG_IRQ_PRIORITY;
// spi_config.mode = NRF_SPIM_MODE_3;
ret_code_t ret = nrf_drv_spi_init(&spi, &spi_config, spi_event_handler, NULL);
if(ret != NRF_SUCCESS)
NRF_LOG_INFO("SPI init failed: %d", ret);
//APP_ERROR_CHECK(nrf_drv_spi_init(&spi, &spi_config, NULL, NULL));
NRF_LOG_INFO("<---- ADXL325 reset ---->");
adxl362_reset();
NRF_LOG_INFO("<--- ADXL325 set power control register --->");
beginMeasure();
while (1)
{
#if 0
// Reset rx buffer and transfer done flag
memset(m_rx_buf, 0, m_length);
spi_xfer_done = false;
// APP_ERROR_CHECK(nrf_drv_spi_transfer(&spi, tx, 3, rx, 3));
nrf_drv_spi_transfer(&spi, tx, 3, rx, 1);
NRF_LOG_INFO("SPI tx: %d", ret);
NRF_LOG_INFO("** %d %d %d", rx[0], rx[1], rx[2]);
// NRF_LOG_HEXDUMP_INFO(rx, 2);
// read Reg 2D before modifying for measure mode
uint8_t reg_val = adxl362_read_one_reg(XL362_POWER_CTL);
NRF_LOG_INFO(", Reg 2D after = %d", reg_val);
#endif
while (!spi_xfer_done)
{
__WFE();
}
NRF_LOG_FLUSH();
// bsp_board_led_invert(BSP_BOARD_LED_0);
nrf_delay_ms(200);
}
}