
Hi,
I am working on a project where I need to create a ~23 kHz square wave signal with a 12-bit DAC (AD5721). The communication works via SPI.
I got it working alright by using the spi driver and the timer driver. The problem is, I can’t reach the desired 23 KHz, but only around 20 KHz.
The program works approximately like this:
- Initializing SPI: frequency 8 MHz, SPI Mode 1
- Configure DAC
- Configure and initialize timer: frequency 8 MHz, Timer counter bit width 32 bit, Interrupt priority 7.
- Setting the timer channel in extended compare mode
- Call timer handle according to the entered microseconds
Below is the code of the timer handle to switch the output voltage of the DAC.
bool sign = true; //used to switch positiv and negativ output voltage
void dac_timer_handler(nrf_timer_event_t event_type, void* p_context)
{
if (sign == true){
ad5721r_write(CMD_WRITE_UPDATE_DAC_REG, voltagePos);
sign = false;
}
else{
ad5721r_write(CMD_WRITE_UPDATE_DAC_REG, voltageNeg);
sign = true;
}
}
Here is a snipped of an oscilloscope reading. The timer handle is called every 25 us to toggle between +4V and -4V (square wave signal is 20 KHz). The yellow line is the AD5721 output voltage. The green line is the clock (24 bit, 3us), and the violet line is the SS (SYNC).
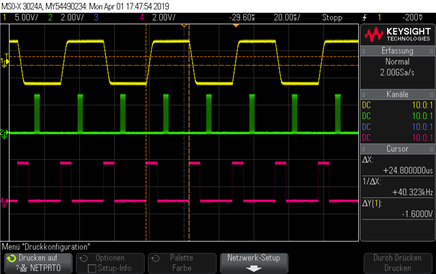
According to the data sheet on page 22 the communication works as it is supposed to:
“The write sequence begins after bringing the SYNC line low, and maintaining this line low until the complete data-word is loaded from the SDI pin. Data is loaded in at the SCLK falling edge transition (see Figure 2). When SYNC is brought high again, the serial data-word is decoded according to the instructions”
Problem: As soon as I decrease the timer tick events below 25 us (here 22 us for a period of 22.73 kHz) I get a square wave signal with an incorrect duty cycle. This can be seen in the oscilloscope image below.
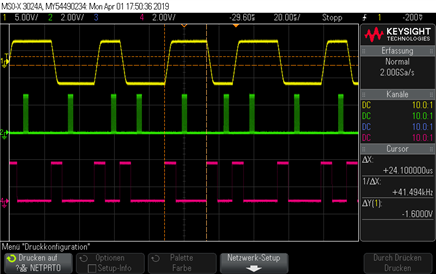
Why isn’t the SYNC brought up to high again directly after the clock and data transfer has ended? Is this a similar problem like this Q&A: https://devzone.nordicsemi.com/f/nordic-q-a/9636/spi-clock-bug. ?
I’m new to working with Nordic Semi products and still a student. I hope this is not an unnecessary Q&A post.
Thanks a lot in advance for the help.

