Hi,
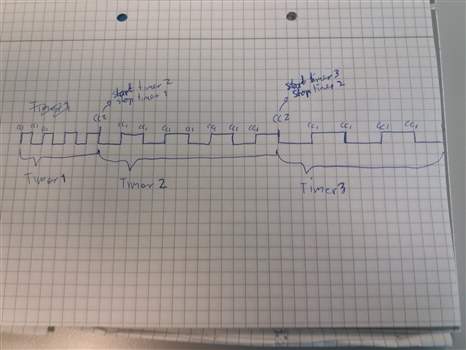
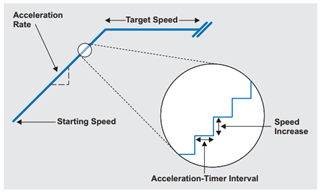
Experimenting on a stepper motor control (DRV8834). I want to be able to send a single square wave output, with a specified number of pulses. I managed to put together something that works ok using two timers and PPI after reading posts on DevZone. Now I need to find a way to modify this to achieve acceleration / decceleration. I would prefer in the same style using PPI if possible. Any suggestions?
typedef enum {
MICROSTEP_1 = 1,
MICROSTEP_2 = 2,
MICROSTEP_4 = 4,
MICROSTEP_8 = 8,
MICROSTEP_16 = 16,
MICROSTEP_32 = 32
}step_mode_t;
void move_linear(uint32_t travel_distance_um, uint32_t mm_per_sec, step_mode_t step_mode)
{
const uint8_t step_len_um = 13;
float nbr_pulses = (float)(travel_distance_um*step_mode)/step_len_um;
uint32_t nbr_toggles = (uint32_t)(nbr_pulses*2);
float pt_pulses_us = ((float)travel_distance_um*1000/mm_per_sec)/nbr_toggles;
uint32_t timer_ticks_reload = (uint32_t)(pt_pulses_us / 0.0625) + 3;
// Stop timers before change
NRF_TIMER1->TASKS_STOP = 1;
NRF_TIMER2->TASKS_STOP = 1;
//Setup pulse out pin
NRF_GPIOTE->CONFIG[0] = GPIOTE_CONFIG_MODE_Task << GPIOTE_CONFIG_MODE_Pos |
GPIOTE_CONFIG_POLARITY_Toggle << GPIOTE_CONFIG_POLARITY_Pos |
LED_1 << GPIOTE_CONFIG_PSEL_Pos |
GPIOTE_CONFIG_OUTINIT_Low << GPIOTE_CONFIG_OUTINIT_Pos;
//Setup pulse counter
NRF_TIMER2->MODE = 1; //Counter mode
NRF_TIMER2->BITMODE = 3; //32 bit
NRF_TIMER2->TASKS_CLEAR = 1; //Clear counter value
NRF_TIMER2->CC[1] = nbr_toggles; //Stop after <nbr> of pulses
NRF_TIMER2->SHORTS = TIMER_SHORTS_COMPARE1_CLEAR_Enabled << TIMER_SHORTS_COMPARE1_CLEAR_Pos;
//Setup pulse out timer
NRF_TIMER1->MODE = 0; //Timer mode
NRF_TIMER1->BITMODE = 3; //32 bit
NRF_TIMER1->PRESCALER = 0; //16Mhz
NRF_TIMER1->CC[1] = timer_ticks_reload;
NRF_TIMER1->SHORTS = TIMER_SHORTS_COMPARE1_CLEAR_Enabled << TIMER_SHORTS_COMPARE1_CLEAR_Pos;
//PPI connections
NRF_PPI->CH[0].EEP = (uint32_t) &NRF_TIMER1->EVENTS_COMPARE[1]; // input = compare event of timer1
NRF_PPI->CH[0].TEP = (uint32_t) &NRF_GPIOTE->TASKS_OUT[0]; // output = polarity toggle of the selected gpio
NRF_PPI->FORK[0].TEP = (uint32_t) &NRF_TIMER2->TASKS_COUNT;
NRF_PPI->CH[1].EEP = (uint32_t) &NRF_TIMER2->EVENTS_COMPARE[1]; // input = compare event of timer2
NRF_PPI->CH[1].TEP = (uint32_t) &NRF_TIMER2->TASKS_CAPTURE[1];
NRF_PPI->FORK[1].TEP = (uint32_t) &NRF_TIMER1->TASKS_STOP; //Stop pulse timer afer X pulses counted
NRF_PPI->CHENSET = (PPI_CHENSET_CH0_Enabled << PPI_CHENSET_CH0_Pos);
NRF_PPI->CHENSET = (PPI_CHENSET_CH1_Enabled << PPI_CHENSET_CH1_Pos);
//*(uint32_t*)0x40009C0C = 1; // pan73_workaround
NRF_TIMER2->TASKS_START = 1; // Start counter
NRF_TIMER1->TASKS_START = 1; // Start timer
}
int main(void)
{
move_linear(13, 10, MICROSTEP_16);
while(1);
}
BR
//Ola