Hello
I would like use at least 2PPI channels to control a GPIO.
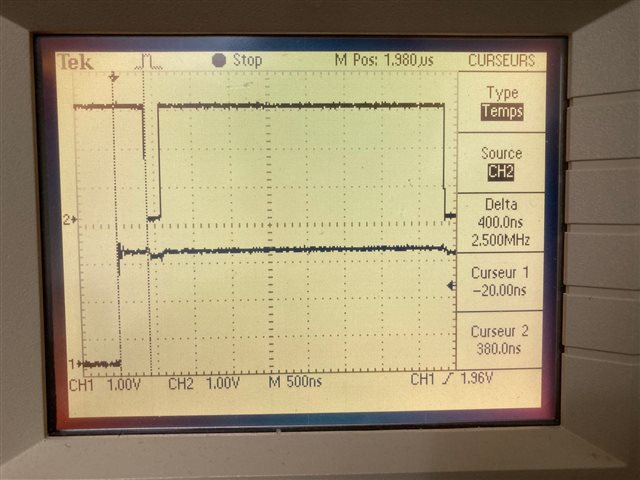
If PPI CH0&CH1 both setup, then GPIO_CTL just go high.
If PPI CH0 remarked, then GPIO_CTL go low
How to use 2ppi to control 1gpio?
The code as below
uint32_t PPI_evt_addr;
uint32_t PPI_task_addr;
nrf_ppi_channel_t ppi_channel;
/* PPI CHANNEL0 SETUP */
ppi_channel=NRF_PPI_CHANNEL0;
nrf_drv_gpiote_out_config_t config_1=GPIOTE_CONFIG_OUT_TASK_HIGH;
nrf_drv_gpiote_out_init(GPIO_CTL , &config_1);
nrf_drv_ppi_channel_alloc(&ppi_channel);
PPI_evt_addr = nrf_drv_timer_event_address_get(&TIMER1, NRF_TIMER_EVENT_COMPARE0);
PPI_task_addr = nrf_drv_gpiote_out_task_addr_get(GPIO_CTL);
nrf_drv_ppi_channel_assign(ppi_channel, PPI_evt_addr, PPI_task_addr);
nrf_drv_ppi_channel_enable(ppi_channel);
nrf_drv_gpiote_out_task_enable(GPIO_CTL);
/* PPI CHANNEL1 SETUP */
ppi_channel=NRF_PPI_CHANNEL1;
nrf_drv_gpiote_out_config_t config_0=GPIOTE_CONFIG_OUT_TASK_LOW;
nrf_drv_gpiote_out_init(GPIO_CTL , &config_0);
nrf_drv_ppi_channel_alloc(&ppi_channel);
PPI_evt_addr = nrf_drv_timer_event_address_get(&TIMER2, NRF_TIMER_EVENT_COMPARE0);
PPI_task_addr = nrf_drv_gpiote_out_task_addr_get(GPIO_CTL);
nrf_drv_ppi_channel_assign(ppi_channel, PPI_evt_addr, PPI_task_addr);
nrf_drv_ppi_channel_enable(ppi_channel);
nrf_drv_gpiote_out_task_enable(GPIO_CTL);