Good afternoon everyone,
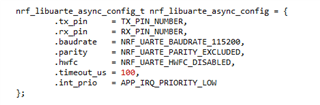
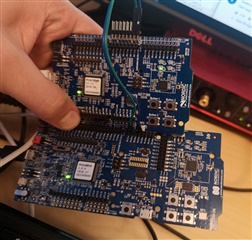
I am facing problems using libuarte example (SDK 17 and NRF52 DK. Using SES and S132, PCA 10040)
It works well with puTTY or other software, but I want to use it to read data from an Arduino.
What I do is the following :
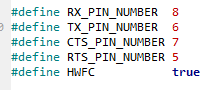
I connect the RX pin to pin 8 and TX pin to pin 6 as described in the pca10040.h.
Rx is connected to the Tx pin of my Arduino (which is sending data, I can see it with the blinking LED), but I do not see any LED on with the NRF52 DK nor any response ...
From what I've understood, whenever the nrf52 receives data, it must echo it, but it does not echo neither in Arduino, neither in puTTY. (I've understood that I need to use NRF_LOG_INFO to print using puTTY because UART was used with GPIO)
I've also tried the uart project, using flow Control, but I've been unable to receive data as well ...
Is there something that need to be changed in the example to read data with UART using the RX pin and libuarte example ?
Thanks a lot for your answer,
Roduss


 ?
?