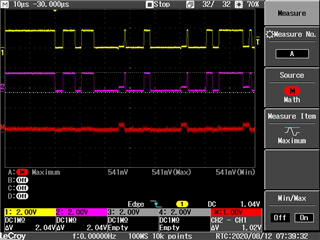
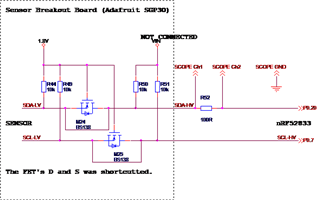
Is there any way to reduce the TWIM SDA line input current? We use a 1.8V I2C sensor (connected via level shifter) that can sink 2mA max. So, the communication will fail because the sensor can't pull the SDA line to LOW level. The current (measured between sensor SDA and nRF52833 is about 10mA when the sensor is trying to pull the SDA line LOW.
Thanks!