
Dear all,
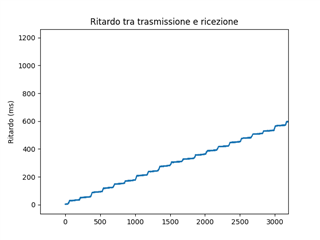
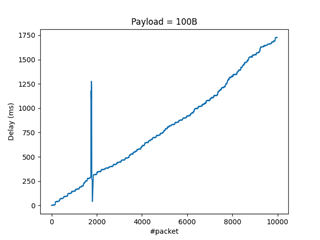
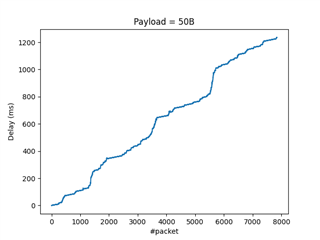
I'm using nrf52-DK with PCA10040 as sniffer. I develop 2 custom board (nRF52840) (one acting as master, one as slave) and I would like to make some considerations about packets delay. What is the most correct method to do so? I know that the field "time" is the one append by UART and that the most accurate is the field "delta time": so if a I want to calculate delay beetween trasmission and reception, which fields do I have to use?
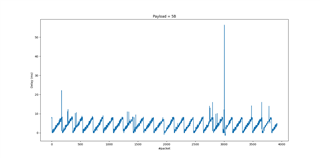
Moreover, I also tried calculating it putting the packets on 2 different serial port (after the trasmission and the reception), appending a timestamp and post-processing it, but the result (for packet bigger than 50B) is quite strange( figure: /resized-image/__size/320x240/__key/support-attachments/beef5d1b77644c448dabff31668f3a47-0514cb2d3e5046b48f0972c4924097bb/Figure_5F00_1.png). Any ideas about these?
Thanks in advance to everyone!


{kind=link}
{kind=link}
{kind=link}
{kind=link}