
Hello,
I'm trying on the ESB examples in nRF Connect SDK v1.3.1, but it seems the Zephyr is crashing during the call k_sleep (l. 54). The following code I isolate the "k_sleep" in a thread to pinpoint the source.
I'm using the PCA10040 board.
#include <drivers/clock_control.h>
#include <drivers/clock_control/nrf_clock_control.h>
#include <drivers/gpio.h>
#include <irq.h>
#include <logging/log.h>
#include <nrf.h>
#include <zephyr.h>
#include <zephyr/types.h>
LOG_MODULE_REGISTER(main_unit);
#define DT_DRV_COMPAT nordic_nrf_clock
int clocks_start(void)
{
int err;
struct device *clk;
clk = device_get_binding(DT_INST_LABEL(0));
if (!clk) {
LOG_ERR("Clock device not found!");
return -EIO;
}
err = clock_control_on(clk, CLOCK_CONTROL_NRF_SUBSYS_HF);
if (err && (err != -EINPROGRESS)) {
LOG_ERR("HF clock start fail: %d", err);
return err;
}
/* Block until clock is started.
*/
while (clock_control_get_status(clk, CLOCK_CONTROL_NRF_SUBSYS_HF) !=
CLOCK_CONTROL_STATUS_ON) {
}
LOG_DBG("HF clock started");
return 0;
}
#define NEW_THREAD_PRIO K_PRIO_PREEMPT(10)
#define NEW_THREAD_OPT (0) //(K_FP_REGS)
K_THREAD_STACK_DEFINE(new_thread_stack, 2000);
struct k_thread new_thread_tcb;
static void new_thread_entry(void *p1, void *p2, void *p3) {
(void)p1;
(void)p2;
(void)p3;
while (1) {
k_sleep(K_MSEC(100));
}
}
void main(void)
{
int err;
err = clocks_start();
if (err) {
return;
}
if (!k_thread_create(&new_thread_tcb, new_thread_stack,
K_THREAD_STACK_SIZEOF(new_thread_stack),
new_thread_entry,
NULL, NULL, NULL,
NEW_THREAD_PRIO, NEW_THREAD_OPT, K_NO_WAIT))
{
LOG_ERR("NEW THR FAILED");
return;
}
}
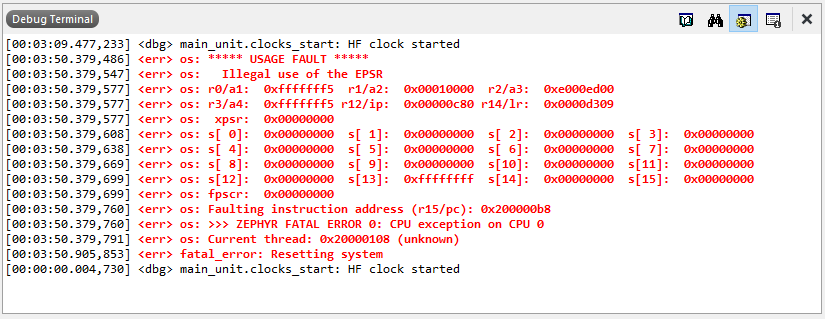
During debug the firmware is trapped in "z_arm_exc_spurious" handler. The log shows:
I tried several stack sizes and priorities for the new thread, but the crash persisted.
Did someone experiment this behaviour before?
---
Best Regards.
Christofer
