Hi,
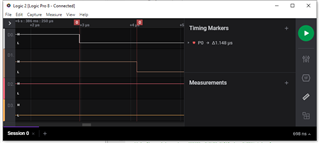
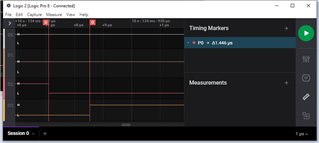
While trying to measure timings with input captures and pin interrupts, I noticed that the SDK-provided pin changed event is very slow : by the time my handler starts running, the signal level has changed...
I then discovered https://devzone.nordicsemi.com/f/nordic-q-a/54956/copying-vector-table-to-ram-unknown-function-at-0x00000000 and managed to set my own handler for GPIOTE.
Works fine : i typically have a max delay between TIMER0 capture and handler start of ~3us with 1 sensor, and ~70us with 3 sensors.
I then tried to make those measurements while using softdevice (s140) to send out the numbers through BLE.
If measurements are performed within a timeslot, everything seems to work properly, including with the interrupt vector moved to RAM and with my custom GPIOTE handler.
So far so good, but running a couple of examples for a few hours is not enough to uncover all possible problems.
So my question is : do yo see any problems moving the vector table to RAM and tweaking handlers while using softdevice ? or can you confirm this is safe ?
Thanks in advance,
David