
Hello, I am stuck initalising both TWIM and UARTE. I am focusing on the TWI Scanner example but using TWIM instead of TWI. No matter what I do I cannot get past the initalisation. The problem is that for both peripherals they fail the condition p_cb->state != NRFX_DRV_STATE_UNINITIALIZED.
I am seeing consistantly p_cb->state = 0x28 for UARTE and 0x10 for TWIM.
To simplify the reproduction I've now removed TWIM from my code and am only focusing on UARTE. I am really stuck at the moment and could use some advice.
My setup
- Development Software:
- nRF52 SDK v17.0.2
- No software device
- IDE: Visual Studio Code v1.53.2
- Hardware: nRF52 DK (nRF52832) It says 2.0.0 on the sticker, I'm guessing that's the version?
- Computer Platform: Ubuntu 20.10
Code
extern "C" {
#include <stdio.h>
#include "boards.h"
#include "app_util_platform.h"
#include "app_error.h"
#include "sdk_config.h"
#include "nrf.h"
#include "nrf_log.h"
#include "nrf_log_ctrl.h"
#include "nrf_log_default_backends.h"
}
int main() {
APP_ERROR_CHECK(NRF_LOG_INIT(NULL));
NRF_LOG_DEFAULT_BACKENDS_INIT(); // Hangs here
while (true)
{
NRF_LOG_INFO("TWI scanner started.");
NRF_LOG_FLUSH();
}
return 0;
}
Preprocessor definitions
- BOARD_PCA10040
- NRF52832_XXAA
- ENABLE_SWO
- ENABLE_TRACE
- DEBUG
- DEBUG_NRF
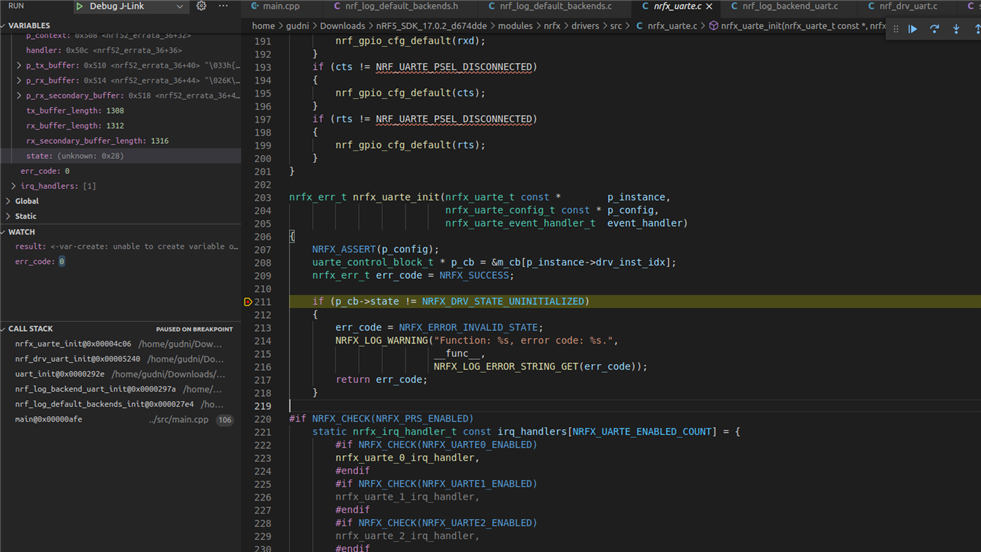
Screenshots
You can see on the left that state is assigned 0x28. Where does that value come from? Perhaps the variable is uninitalised and random?
SDK Source files
- /components/libraries/util/app_util_platform.c
- /components/libraries/util/app_error.c
- /components/libraries/util/app_error_handler_gcc.c
- /components/serialization/connectivity/ser_conn_error_handling.c
- /components/libraries/ringbuf/nrf_ringbuf.c
- /components/libraries/memobj/nrf_memobj.c
- /components/libraries/balloc/nrf_balloc.c
- /components/libraries/atomic/nrf_atomic.c
- /components/libraries/log/src/nrf_log_frontend.c
- /components/libraries/log/src/nrf_log_default_backends.c
- /components/libraries/log/src/nrf_log_backend_uart.c
- /components/libraries/log/src/nrf_log_backend_serial.c
- /components/libraries/log/src/nrf_log_str_formatter.c
- /external/fprintf/nrf_fprintf.c
- /external/fprintf/nrf_fprintf_format.c
- /modules/nrfx/drivers/src/nrfx_uart.c
- /modules/nrfx/drivers/src/nrfx_uarte.c
- /modules/nrfx/drivers/src/prs/nrfx_prs.c
- /integration/nrfx/legacy/nrf_drv_uart.c

