Hello
I am currently porting nRF52833 using SPI communication with other MCU (AD5940).
AD5940 provides an example of porting with stm32, which we are referring to.
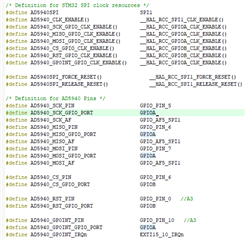
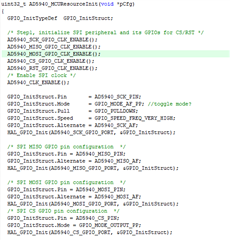
Currently, no function is found to replace the Clock Enable used by stm32.
Can I get some help? Related photos are as follows.
----------------------------The code in the example.


I'm sorry I brought you a question about another MCU..!
Best regards.