Hello ,
I am working on a project which contains I2C communication,
When I test the twi scanner example on my sensor and it works fine
But when I do the combination with the usbd_ble_uart example to send the data to uart I encountered a problem during an I2C read operation. My code stuck in this infinite loop
bool transmission_finished = false;
do {
if (nrf_twim_event_check(p_twim, NRF_TWIM_EVENT_SUSPENDED))
{
transmission_finished = true;
}
if (nrf_twim_event_check(p_twim, NRF_TWIM_EVENT_STOPPED))
{
nrf_twim_event_clear(p_twim, NRF_TWIM_EVENT_STOPPED);
transmission_finished = true;
}
if (nrf_twim_event_check(p_twim, NRF_TWIM_EVENT_ERROR))
{
nrf_twim_event_clear(p_twim, NRF_TWIM_EVENT_ERROR);
bool lasttx_triggered = nrf_twim_event_check(p_twim, NRF_TWIM_EVENT_LASTTX);
uint32_t shorts_mask = nrf_twim_shorts_get(p_twim);
if (!(lasttx_triggered && (shorts_mask & NRF_TWIM_SHORT_LASTTX_STOP_MASK)))
{
// Unless LASTTX event arrived and LASTTX_STOP shortcut is active,
// triggering of STOP task in case of error has to be done manually.
nrf_twim_task_trigger(p_twim, NRF_TWIM_TASK_RESUME);
nrf_twim_task_trigger(p_twim, NRF_TWIM_TASK_STOP);
// Mark transmission as not finished yet,
// as STOPPED event is expected to arrive.
// If LASTTX_SUSPENDED shortcut is active,
// NACK has been received on last byte sent
// and SUSPENDED event happened to be checked before ERROR,
// transmission will be marked as finished.
// In such case this flag has to be overwritten.
transmission_finished = false;
}
if (lasttx_triggered && (shorts_mask & NRF_TWIM_SHORT_LASTTX_SUSPEND_MASK))
{
// When STOP task was triggered just before SUSPEND task has taken effect,
// SUSPENDED event may not arrive.
// However if SUSPENDED arrives it always arrives after ERROR.
// Therefore SUSPENDED has to be cleared
// so it does not cause premature termination of busy loop
// waiting for STOPPED event to arrive.
nrf_twim_event_clear(p_twim, NRF_TWIM_EVENT_SUSPENDED);
// Mark transmission as not finished yet,
// for same reasons as above.
transmission_finished = false;
}
}
} while (!transmission_finished);
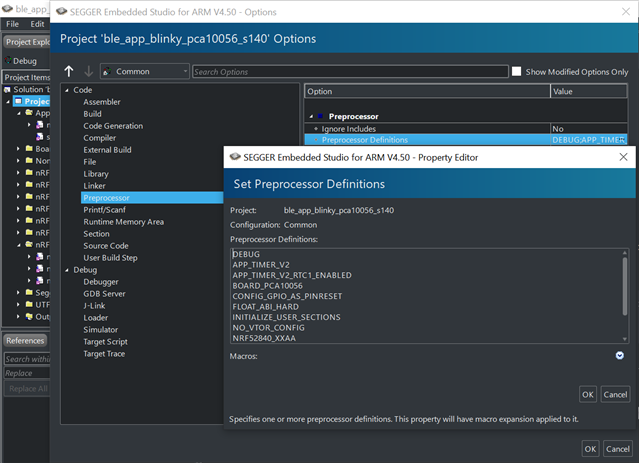
Although I tried to copy all the configuration performed in the example of twi scanner
Please Help me .