
Hello,
I am Working on the nRF52840 custom board.
To drive the motor and buzzer I am using a PWM driver in that when I set duty-cycle 20 percent then the output of PWM shows flip (means 80 percent).
So, what are the issues with PWM? why I am getting flip output on PWM pins?
Here I am sharing my configuration.
/**
* Copyright (c) 2015 - 2020, Nordic Semiconductor ASA
*
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without modification,
* are permitted provided that the following conditions are met:
*
* 1. Redistributions of source code must retain the above copyright notice, this
* list of conditions and the following disclaimer.
*
* 2. Redistributions in binary form, except as embedded into a Nordic
* Semiconductor ASA integrated circuit in a product or a software update for
* such product, must reproduce the above copyright notice, this list of
* conditions and the following disclaimer in the documentation and/or other
* materials provided with the distribution.
*
* 3. Neither the name of Nordic Semiconductor ASA nor the names of its
* contributors may be used to endorse or promote products derived from this
* software without specific prior written permission.
*
* 4. This software, with or without modification, must only be used with a
* Nordic Semiconductor ASA integrated circuit.
*
* 5. Any software provided in binary form under this license must not be reverse
* engineered, decompiled, modified and/or disassembled.
*
* THIS SOFTWARE IS PROVIDED BY NORDIC SEMICONDUCTOR ASA "AS IS" AND ANY EXPRESS
* OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES
* OF MERCHANTABILITY, NONINFRINGEMENT, AND FITNESS FOR A PARTICULAR PURPOSE ARE
* DISCLAIMED. IN NO EVENT SHALL NORDIC SEMICONDUCTOR ASA OR CONTRIBUTORS BE
* LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
* CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE
* GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION)
* HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT
* OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
/** @file
* @defgroup pwm_example_main main.c
* @{
* @ingroup pwm_example
*
* @brief PWM Example Application main file.
*
* This file contains the source code for a sample application using PWM.
*/
#include <stdio.h>
#include <string.h>
#include "nrf_drv_pwm.h"
#include "app_util_platform.h"
#include "app_error.h"
#include "boards.h"
#include "bsp.h"
#include "app_timer.h"
#include "nrf_drv_clock.h"
#include "nrf_log.h"
#include "nrf_log_ctrl.h"
#include "nrf_log_default_backends.h"
static nrf_drv_pwm_t m_pwm0 = NRF_DRV_PWM_INSTANCE(0);
static nrf_drv_pwm_t m_pwm1 = NRF_DRV_PWM_INSTANCE(1);
static nrf_drv_pwm_t m_pwm2 = NRF_DRV_PWM_INSTANCE(2);
// This is for tracking PWM instances being used, so we can unintialize only
// the relevant ones when switching from one demo to another.
#define USED_PWM(idx) (1UL << idx)
static uint8_t m_used = 0;
static uint16_t const m_demo1_top = 10000;
static uint16_t const m_demo1_step = 200;
static uint8_t m_demo1_phase;
static nrf_pwm_values_individual_t m_demo1_seq_values;
static nrf_pwm_sequence_t const m_demo1_seq =
{
.values.p_individual = &m_demo1_seq_values,
.length = NRF_PWM_VALUES_LENGTH(m_demo1_seq_values),
.repeats = 0,
.end_delay = 0
};
static void demo1_handler(nrf_drv_pwm_evt_type_t event_type)
{
if (event_type == NRF_DRV_PWM_EVT_FINISHED)
{
uint8_t channel = m_demo1_phase >> 1;
bool down = m_demo1_phase & 1;
bool next_phase = false;
uint16_t * p_channels = (uint16_t *)&m_demo1_seq_values;
uint16_t value = p_channels[channel];
/*
if (down)
{
value -= m_demo1_step;
if (value == 0)
{
next_phase = true;
}
}
else
{
value += m_demo1_step;
if (value >= m_demo1_top)
{
next_phase = true;
}
}
p_channels[channel] = value;
if (next_phase)
{
if (++m_demo1_phase >= 2 * NRF_PWM_CHANNEL_COUNT)
{
m_demo1_phase = 0;
}
}*/
p_channels[0] = 5000;
p_channels[1] = 2500;
p_channels[2] = 2000;
}
}
static void demo1(void)
{
NRF_LOG_INFO("Demo 1");
/*
* This demo plays back a sequence with different values for individual
* channels (LED 1 - LED 4). Only four values are used (one per channel).
* Every time the values are loaded into the compare registers, they are
* updated in the provided event handler. The values are updated in such
* a way that increase and decrease of the light intensity can be observed
* continuously on succeeding channels (one second per channel).
*/
nrf_drv_pwm_config_t const config0 =
{
.output_pins =
{
LED_1 | NRF_DRV_PWM_PIN_INVERTED, // channel 0
LED_2 | NRF_DRV_PWM_PIN_INVERTED, // channel 1
LED_3 | NRF_DRV_PWM_PIN_INVERTED, // channel 2
LED_4 | NRF_DRV_PWM_PIN_INVERTED // channel 3
},
.irq_priority = APP_IRQ_PRIORITY_LOWEST,
.base_clock = NRF_PWM_CLK_1MHz,
.count_mode = NRF_PWM_MODE_UP,
.top_value = m_demo1_top,
.load_mode = NRF_PWM_LOAD_INDIVIDUAL,
.step_mode = NRF_PWM_STEP_AUTO
};
APP_ERROR_CHECK(nrf_drv_pwm_init(&m_pwm0, &config0, demo1_handler));
m_used |= USED_PWM(0);
m_demo1_seq_values.channel_0 = 0;
m_demo1_seq_values.channel_1 = 0;
m_demo1_seq_values.channel_2 = 0;
m_demo1_seq_values.channel_3 = 0;
m_demo1_phase = 0;
(void)nrf_drv_pwm_simple_playback(&m_pwm0, &m_demo1_seq, 1,
NRF_DRV_PWM_FLAG_LOOP);
}
static void demo2(void)
{
NRF_LOG_INFO("Demo 2");
/*
* This demo plays back two concatenated sequences:
* - Sequence 0: Light intensity is increased in 25 steps during one second.
* - Sequence 1: LED blinks twice (100 ms off, 100 ms on), then stays off
* for 200 ms.
* The same output is generated on all 4 channels (LED 1 - LED 4).
* The playback is repeated in a loop.
*/
enum { // [local constants]
TOP = 10000,
STEP_COUNT = 25
};
nrf_drv_pwm_config_t const config0 =
{
.output_pins =
{
BSP_LED_0 | NRF_DRV_PWM_PIN_INVERTED, // channel 0
BSP_LED_1 | NRF_DRV_PWM_PIN_INVERTED, // channel 1
BSP_LED_2 | NRF_DRV_PWM_PIN_INVERTED, // channel 2
BSP_LED_3 | NRF_DRV_PWM_PIN_INVERTED // channel 3
},
.irq_priority = APP_IRQ_PRIORITY_LOWEST,
.base_clock = NRF_PWM_CLK_500kHz,
.count_mode = NRF_PWM_MODE_UP,
.top_value = TOP,
.load_mode = NRF_PWM_LOAD_COMMON,
.step_mode = NRF_PWM_STEP_AUTO
};
APP_ERROR_CHECK(nrf_drv_pwm_init(&m_pwm0, &config0, NULL));
m_used |= USED_PWM(0);
// This array cannot be allocated on stack (hence "static") and it must
// be in RAM.
static nrf_pwm_values_common_t seq0_values[STEP_COUNT];
uint16_t value = 0;
uint16_t step = TOP / STEP_COUNT;
uint8_t i;
for (i = 0; i < STEP_COUNT; ++i)
{
value += step;
seq0_values[i] = value;
}
nrf_pwm_sequence_t const seq0 =
{
.values.p_common = seq0_values,
.length = NRF_PWM_VALUES_LENGTH(seq0_values),
.repeats = 1,
.end_delay = 0
};
// This array cannot be allocated on stack (hence "static") and it must
// be in RAM (hence no "const", though its content is not changed).
static nrf_pwm_values_common_t /*const*/ seq1_values[] =
{
0,
0x8000,
0,
0x8000,
0,
0
};
nrf_pwm_sequence_t const seq1 =
{
.values.p_common = seq1_values,
.length = NRF_PWM_VALUES_LENGTH(seq1_values),
.repeats = 4,
.end_delay = 0
};
(void)nrf_drv_pwm_complex_playback(&m_pwm0, &seq0, &seq1, 1,
NRF_DRV_PWM_FLAG_LOOP);
}
static void demo3(void)
{
NRF_LOG_INFO("Demo 3");
/*
* This demo uses only one channel, which is reflected on LED 1.
* The LED blinks three times (200 ms on, 200 ms off), then it stays off
* for one second.
* This scheme is performed three times before the peripheral is stopped.
*/
nrf_drv_pwm_config_t const config0 =
{
.output_pins =
{
BSP_LED_0 | NRF_DRV_PWM_PIN_INVERTED, // channel 0
NRF_DRV_PWM_PIN_NOT_USED, // channel 1
NRF_DRV_PWM_PIN_NOT_USED, // channel 2
NRF_DRV_PWM_PIN_NOT_USED, // channel 3
},
.irq_priority = APP_IRQ_PRIORITY_LOWEST,
.base_clock = NRF_PWM_CLK_125kHz,
.count_mode = NRF_PWM_MODE_UP,
.top_value = 25000,
.load_mode = NRF_PWM_LOAD_COMMON,
.step_mode = NRF_PWM_STEP_AUTO
};
APP_ERROR_CHECK(nrf_drv_pwm_init(&m_pwm0, &config0, NULL));
m_used |= USED_PWM(0);
// This array cannot be allocated on stack (hence "static") and it must
// be in RAM (hence no "const", though its content is not changed).
static uint16_t /*const*/ seq_values[] =
{
0x8000,
0,
0x8000,
0,
0x8000,
0
};
nrf_pwm_sequence_t const seq =
{
.values.p_common = seq_values,
.length = NRF_PWM_VALUES_LENGTH(seq_values),
.repeats = 0,
.end_delay = 4
};
(void)nrf_drv_pwm_simple_playback(&m_pwm0, &seq, 3, NRF_DRV_PWM_FLAG_STOP);
}
static void demo4(void)
{
NRF_LOG_INFO("Demo 4");
/*
* This demo uses all three PWM peripheral instances:
* - PWM0 drives LED 1 and LED 2: Subsequent 2-bit binary values are
* presented every 500 ms.
* - PWM1 drives LED 3: During 500 ms, the LED increases and decreases
* the light intensity, then it stays off for 1500 ms.
* - PWM2 drives LED 4: For 500 ms, the LED stays off, then during 1500 ms
* it increases and decreases the light intensity.
* Simple playback with grouped loading mode is used for PWM0, and complex
* playback with common loading mode is used for both PWM1 and PWM2.
*/
nrf_drv_pwm_config_t config =
{
// These are the common configuration options we use for all PWM
// instances.
.irq_priority = APP_IRQ_PRIORITY_LOWEST,
.count_mode = NRF_PWM_MODE_UP,
.step_mode = NRF_PWM_STEP_AUTO,
};
////////////////////////////////////////////////////////////////////////////
// PWM0 initialization.
config.output_pins[0] = BSP_LED_0 | NRF_DRV_PWM_PIN_INVERTED;
config.output_pins[1] = NRF_DRV_PWM_PIN_NOT_USED;
config.output_pins[2] = BSP_LED_1 | NRF_DRV_PWM_PIN_INVERTED;
config.output_pins[3] = NRF_DRV_PWM_PIN_NOT_USED;
config.base_clock = NRF_PWM_CLK_125kHz;
config.top_value = 31250; // 250ms period
config.load_mode = NRF_PWM_LOAD_GROUPED;
APP_ERROR_CHECK(nrf_drv_pwm_init(&m_pwm0, &config, NULL));
m_used |= USED_PWM(0);
// This array cannot be allocated on stack (hence "static") and it must
// be in RAM (hence no "const", though its content is not changed).
static nrf_pwm_values_grouped_t /*const*/ pwm0_seq_values[] =
{
{ 0, 0 },
{ 0x8000, 0 },
{ 0, 0x8000 },
{ 0x8000, 0x8000 }
};
nrf_pwm_sequence_t const pwm0_seq =
{
.values.p_grouped = pwm0_seq_values,
.length = NRF_PWM_VALUES_LENGTH(pwm0_seq_values),
.repeats = 1,
.end_delay = 0
};
////////////////////////////////////////////////////////////////////////////
// Common settings for PWM1 and PWM2.
enum { // [local constants]
TOP = 5000,
STEP_COUNT = 50
};
config.base_clock = NRF_PWM_CLK_1MHz;
config.top_value = TOP;
config.load_mode = NRF_PWM_LOAD_COMMON;
// This array cannot be allocated on stack (hence "static") and it must
// be in RAM.
static nrf_pwm_values_common_t fade_in_out_values[2 * STEP_COUNT];
uint16_t value = 0;
uint16_t step = TOP / STEP_COUNT;
uint8_t i;
for (i = 0; i < STEP_COUNT; ++i)
{
value += step;
fade_in_out_values[i] = value;
fade_in_out_values[STEP_COUNT + i] = TOP - value;
}
// This array cannot be allocated on stack (hence "static") and it must
// be in RAM (hence no "const", though its content is not changed).
static nrf_pwm_values_common_t /*const*/ stay_off_values[2] = { 0, 0 };
////////////////////////////////////////////////////////////////////////////
// PWM1 initialization.
config.output_pins[0] = NRF_DRV_PWM_PIN_NOT_USED;
config.output_pins[1] = NRF_DRV_PWM_PIN_NOT_USED;
config.output_pins[2] = BSP_LED_2 | NRF_DRV_PWM_PIN_INVERTED;
config.output_pins[3] = NRF_DRV_PWM_PIN_NOT_USED;
APP_ERROR_CHECK(nrf_drv_pwm_init(&m_pwm1, &config, NULL));
m_used |= USED_PWM(1);
// Sequence 0 - fade-in/fade-out, duration: 500 ms.
nrf_pwm_sequence_t const pwm1_seq0 =
{
.values.p_common = fade_in_out_values,
.length = NRF_PWM_VALUES_LENGTH(fade_in_out_values),
.repeats = 0,
.end_delay = 0
};
// Sequence 1 - off, duration: 1500 ms.
nrf_pwm_sequence_t const pwm1_seq1 =
{
.values.p_common = stay_off_values,
.length = 2,
.repeats = 149,
.end_delay = 0
};
////////////////////////////////////////////////////////////////////////////
// PWM2 initialization.
config.output_pins[0] = NRF_DRV_PWM_PIN_NOT_USED;
config.output_pins[1] = NRF_DRV_PWM_PIN_NOT_USED;
config.output_pins[2] = NRF_DRV_PWM_PIN_NOT_USED;
config.output_pins[3] = BSP_LED_3 | NRF_DRV_PWM_PIN_INVERTED;
APP_ERROR_CHECK(nrf_drv_pwm_init(&m_pwm2, &config, NULL));
m_used |= USED_PWM(2);
// Sequence 0 - fade-in/fade-out, duration: 1500 ms.
nrf_pwm_sequence_t const pwm2_seq0 =
{
.values.p_common = stay_off_values,
.length = 2,
.repeats = 49,
.end_delay = 0
};
// Sequence 1 - off, duration: 500 ms.
nrf_pwm_sequence_t const pwm2_seq1 =
{
.values.p_common = fade_in_out_values,
.length = NRF_PWM_VALUES_LENGTH(fade_in_out_values),
.repeats = 2,
.end_delay = 0
};
(void)nrf_drv_pwm_simple_playback(&m_pwm0, &pwm0_seq, 1,
NRF_DRV_PWM_FLAG_LOOP);
(void)nrf_drv_pwm_complex_playback(&m_pwm1, &pwm1_seq0, &pwm1_seq1, 1,
NRF_DRV_PWM_FLAG_LOOP);
(void)nrf_drv_pwm_complex_playback(&m_pwm2, &pwm2_seq0, &pwm2_seq1, 1,
NRF_DRV_PWM_FLAG_LOOP);
}
static void demo5(void)
{
NRF_LOG_INFO("Demo 5");
/*
* This demo, similarly to demo1, plays back a sequence with different
* values for individual channels. Unlike demo 1, however, it does not use
* an event handler. Therefore, the PWM peripheral does not use interrupts
* and the CPU can stay in sleep mode.
* The LEDs (1-4) blink separately. They are turned on for 125 ms each,
* in counterclockwise order (looking at the board).
*/
nrf_drv_pwm_config_t const config0 =
{
.output_pins =
{
BSP_LED_0 | NRF_DRV_PWM_PIN_INVERTED, // channel 0
BSP_LED_2 | NRF_DRV_PWM_PIN_INVERTED, // channel 1
BSP_LED_3 | NRF_DRV_PWM_PIN_INVERTED, // channel 2
BSP_LED_1 | NRF_DRV_PWM_PIN_INVERTED // channel 3
},
.irq_priority = APP_IRQ_PRIORITY_LOWEST,
.base_clock = NRF_PWM_CLK_125kHz,
.count_mode = NRF_PWM_MODE_UP,
.top_value = 15625,
.load_mode = NRF_PWM_LOAD_INDIVIDUAL,
.step_mode = NRF_PWM_STEP_AUTO
};
APP_ERROR_CHECK(nrf_drv_pwm_init(&m_pwm0, &config0, NULL));
m_used |= USED_PWM(0);
// This array cannot be allocated on stack (hence "static") and it must
// be in RAM (hence no "const", though its content is not changed).
static nrf_pwm_values_individual_t /*const*/ seq_values[] =
{
{ 0x8000, 0, 0, 0 },
{ 0, 0x8000, 0, 0 },
{ 0, 0, 0x8000, 0 },
{ 0, 0, 0, 0x8000 }
};
nrf_pwm_sequence_t const seq =
{
.values.p_individual = seq_values,
.length = NRF_PWM_VALUES_LENGTH(seq_values),
.repeats = 0,
.end_delay = 0
};
(void)nrf_drv_pwm_simple_playback(&m_pwm0, &seq, 1, NRF_DRV_PWM_FLAG_LOOP);
}
static void bsp_evt_handler(bsp_event_t evt)
{
void (* const demos[])(void) =
{
demo1,
demo2,
demo3,
demo4,
demo5
};
uint8_t const demo_idx_max = (sizeof(demos) / sizeof(demos[0])) - 1;
static uint8_t demo_idx = 0;
switch (evt)
{
// Button 1 - switch to the previous demo.
case BSP_EVENT_KEY_0:
if (demo_idx > 0)
{
--demo_idx;
}
else
{
demo_idx = demo_idx_max;
}
break;
// Button 2 - switch to the next demo.
case BSP_EVENT_KEY_1:
if (demo_idx < demo_idx_max)
{
++demo_idx;
}
else
{
demo_idx = 0;
}
break;
default:
return;
}
if (m_used & USED_PWM(0))
{
nrf_drv_pwm_uninit(&m_pwm0);
}
if (m_used & USED_PWM(1))
{
nrf_drv_pwm_uninit(&m_pwm1);
}
if (m_used & USED_PWM(2))
{
nrf_drv_pwm_uninit(&m_pwm2);
}
m_used = 0;
demos[demo_idx]();
}
static void init_bsp()
{
APP_ERROR_CHECK(nrf_drv_clock_init());
nrf_drv_clock_lfclk_request(NULL);
APP_ERROR_CHECK(app_timer_init());
APP_ERROR_CHECK(bsp_init(BSP_INIT_BUTTONS, bsp_evt_handler));
APP_ERROR_CHECK(bsp_buttons_enable());
}
void app_error_fault_handler(uint32_t id, uint32_t pc, uint32_t info)
{
bsp_board_leds_on();
app_error_save_and_stop(id, pc, info);
}
int main(void)
{
APP_ERROR_CHECK(NRF_LOG_INIT(NULL));
NRF_LOG_DEFAULT_BACKENDS_INIT();
init_bsp();
NRF_LOG_INFO("PWM example started.");
// Start with Demo 1, then switch to another one when the user presses
// button 1 or button 2 (see the 'bsp_evt_handler' function).
demo1();
for (;;)
{
// Wait for an event.
__WFE();
// Clear the event register.
__SEV();
__WFE();
NRF_LOG_FLUSH();
}
}
/** @} */

I was also trying to inverted PWM pins,
Hare my configuration,
.output_pins =
{
LED_1 ,//| NRF_DRV_PWM_PIN_INVERTED, // channel 0
LED_2 ,//| NRF_DRV_PWM_PIN_INVERTED, // channel 1
LED_3 | NRF_DRV_PWM_PIN_INVERTED, // channel 2
LED_4 | NRF_DRV_PWM_PIN_INVERTED // channel 3
},
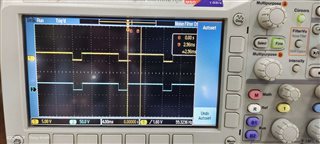
Output on LED1 ( Yellow ), LED3 ( Blue).
Thank you,
