
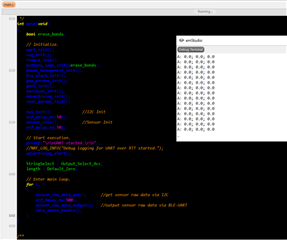
values returned by ACC is always 0 !!
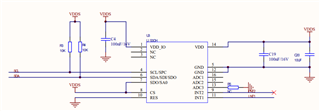
shema hardware LIS3DH :
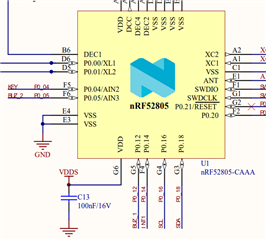
shema hardware NRF52805 && LIS3DH :
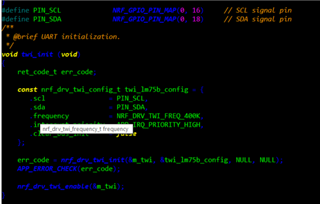
twi initi:
#define PIN_SCL NRF_GPIO_PIN_MAP(0, 16) // SCL signal pin
#define PIN_SDA NRF_GPIO_PIN_MAP(0, 18) // SDA signal pin
I was based on this link NRF52840:
iamjustinwang.blogspot.com/.../nrf52840-ble-app-uart-i2c-lis3dh-acc.html
Please help me to fix this. Also, If you think any other approach is simple and efficient, please let me know. Im open to suggestions.
