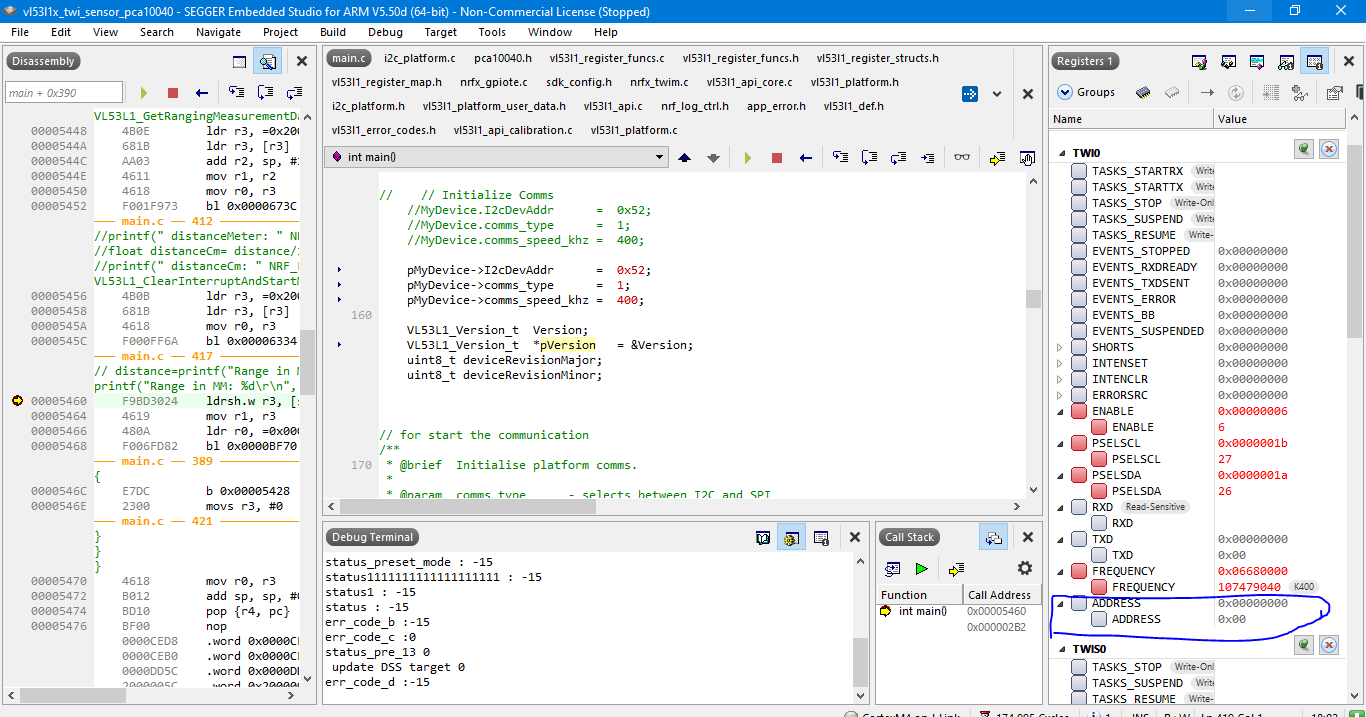
1. Slave address is not reflected in the address register of TWI0.
2. other information is reflected in registers like operating frequency, SDA, SCL as well as enable.
3. due to the problem of the slave address is not getting reflected, I2C communication isn't established with the sensor.
4. please give me all possible suggestion for solving this logical error regarding it.