Hi,
I tried running an spi sample program with code as in below, shorted the MOSI and MISO pins and data was visibly received in print statement:
#include <zephyr.h>
#include <sys/printk.h>
#include <drivers/spi.h>
#include <drivers/gpio.h>
uint32_t freq = 4000000;
static const struct spi_config spi_cfg = {freq,(SPI_WORD_SET(8) | SPI_TRANSFER_MSB),0,nullptr};
const device * spi_dev;
static void spi_init(void)
{
const char* spiName = "SPI_1";
//const char* const spiName = "spi1";
spi_dev = device_get_binding(spiName);
if (spi_dev == NULL) {
printk("Could not get %s device\n", spiName);
return;
}
}
void spi_test_send(void)
{
int err;
static uint32_t tx_buffer[1]={0x05};
//static uint8_t tx_buffer = 128;
//static char tx_buffer[3]={'D','s','s'};
static uint32_t rx_buffer[1];
//static uint8_t rx_buffer;
const struct spi_buf tx_buf = {
.buf = tx_buffer,
.len = sizeof(tx_buffer)
};
const struct spi_buf_set tx = {
.buffers = &tx_buf,
.count = 1
};
struct spi_buf rx_buf = {
.buf = rx_buffer,
.len = sizeof(rx_buffer),
};
const struct spi_buf_set rx = {
.buffers = &rx_buf,
.count = 1
};
err = spi_transceive(spi_dev, &spi_cfg, &tx, &rx);
if (err) {
printk("SPI error: %d\n", err);
} else {
/* Connect MISO to MOSI for loopback */
printk("TX sent: %d\n", tx_buffer[0]);
printk("RX recv: %d\n", rx_buffer[0]);
}
}
void main(void)
{
printk("SPIM Example\n");
spi_init();
while (1) {
spi_test_send();
k_sleep(K_SECONDS(1));
}
}
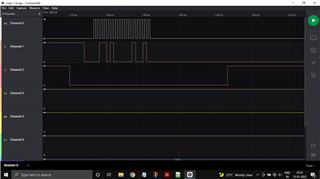
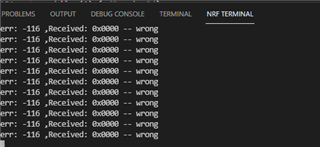
While in the same code if i use spi_write( ) & spi_read( ) apis, which inturn call spi transceive, I am not receiving any data, code as in below:
#include <zephyr.h>
#include <sys/printk.h>
#include <drivers/spi.h>
#include <drivers/gpio.h>
uint32_t freq = 4000000;
static const struct spi_config spi_cfg = {freq,(SPI_WORD_SET(8) | SPI_TRANSFER_MSB),0,nullptr};
const device * spi_dev;
static void spi_init(void)
{
const char* spiName = "SPI_1";
//const char* const spiName = "spi1";
spi_dev = device_get_binding(spiName);
if (spi_dev == NULL) {
printk("Could not get %s device\n", spiName);
return;
}
}
void spi_test_send(void)
{
int err;
static uint32_t tx_buffer[1]={0x05};
//static uint8_t tx_buffer = 128;
//static char tx_buffer[3]={'D','s','s'};
static uint32_t rx_buffer[1];
//static uint8_t rx_buffer;
const struct spi_buf tx_buf = {
.buf = tx_buffer,
.len = sizeof(tx_buffer)
};
const struct spi_buf_set tx = {
.buffers = &tx_buf,
.count = 1
};
struct spi_buf rx_buf = {
.buf = rx_buffer,
.len = sizeof(rx_buffer),
};
const struct spi_buf_set rx = {
.buffers = &rx_buf,
.count = 1
};
err = spi_write(spi_dev, &spi_cfg, &tx);
err = spi_read(spi_dev, &spi_cfg, &rx);
if (err) {
printk("SPI error: %d\n", err);
} else {
/* Connect MISO to MOSI for loopback */
printk("TX sent: %d\n", tx_buffer[0]);
printk("RX recv: %d\n", rx_buffer[0]);
}
}
void main(void)
{
printk("SPIM Example\n");
spi_init();
while (1) {
spi_test_send();
k_sleep(K_SECONDS(1));
}
}
I am getting just -1 in receive buffer.
Kindly suggest what i can do to make spi_write & spi_read work..?