Hello,
Let me just briefly state that I have referred to required documentation and also executed spi_transceive_async() test, at zephyr\tests\drivers\spi\spi_loopback.
So request to kindly not suggest going back to documentation or trying sample program.
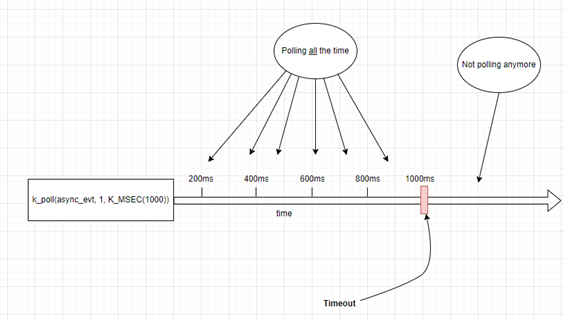
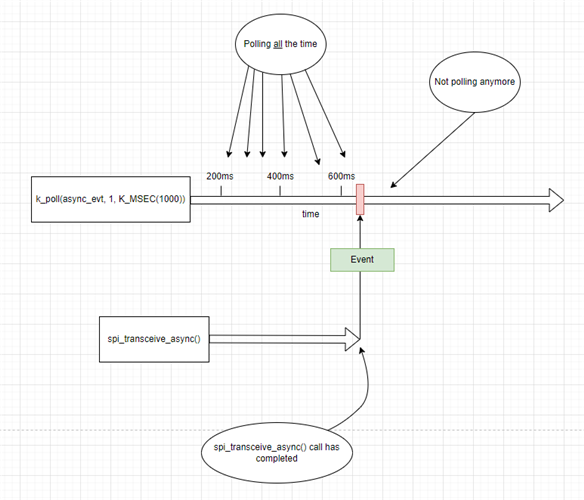
My question is I want to test variations of int num_events & k_timeout_t timeout arguments in k_poll API for "spi_transceive_async".
As in what happens if i vary num_events & what happens if i vary timeout ...?
And how can I get this variation to reflect on "spi_transceive_async"..?
I need to know how to vary and test the sample code at zephyr\tests\drivers\spi\spi_loopback:
As In,
#if (CONFIG_SPI_ASYNC)
static struct k_poll_signal async_sig = K_POLL_SIGNAL_INITIALIZER(async_sig);
static struct k_poll_event async_evt =
K_POLL_EVENT_INITIALIZER(K_POLL_TYPE_SIGNAL,
K_POLL_MODE_NOTIFY_ONLY,
&async_sig);
static K_SEM_DEFINE(caller, 0, 1);
K_THREAD_STACK_DEFINE(spi_async_stack, STACK_SIZE);
static int result = 1;
static void spi_async_call_cb(struct k_poll_event *async_evt,
struct k_sem *caller_sem,
void *unused)
{
int ret;
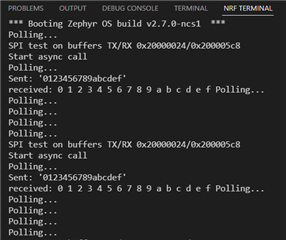
LOG_DBG("Polling...");
while (1) {
ret = k_poll(async_evt, 10, K_MSEC(2000)); /***** varied here ******/
zassert_false(ret, "one or more events are not ready");
result = async_evt->signal->result;
k_sem_give(caller_sem);
/* Reinitializing for next call */
async_evt->signal->signaled = 0U;
async_evt->state = K_POLL_STATE_NOT_READY;
}
}
static int spi_async_call(const struct device *dev,
struct spi_config *spi_conf)
{
const struct spi_buf tx_bufs[] = {
{
.buf = buffer_tx,
.len = BUF_SIZE,
},
};
const struct spi_buf rx_bufs[] = {
{
.buf = buffer_rx,
.len = BUF_SIZE,
},
};
const struct spi_buf_set tx = {
.buffers = tx_bufs,
.count = ARRAY_SIZE(tx_bufs)
};
const struct spi_buf_set rx = {
.buffers = rx_bufs,
.count = ARRAY_SIZE(rx_bufs)
};
int ret;
LOG_INF("Start async call");
ret = spi_transceive_async(dev, spi_conf, &tx, &rx, &async_sig);
if (ret == -ENOTSUP) {
LOG_DBG("Not supported");
return 0;
}
if (ret) {
LOG_ERR("Code %d", ret);
zassert_false(ret, "SPI transceive failed");
return -1;
}
k_sem_take(&caller, K_FOREVER);
if (result) {
LOG_ERR("Call code %d", ret);
zassert_false(result, "SPI transceive failed");
return -1;
}
LOG_INF("Passed");
return 0;
}
#endif
Thanking you in anticipation,