System details:
- Board: Custom
- Chip: nRF52832
- PCA Number: PCA10040
- SoftDevice: S132
- SDK: Version 16.0.0
Until recently, I have had no issues using the TWI module to read/write form all of our various sensor ICs that we have on our custom board. I initialize each sensor and configure them using TWI and it behaves as expected. After initialization/configuration, my application begins to advertise, and when it connects with our Desktop app it continuously streams data from each sensor every 50ms according to a repeated timer. This timer makes use of the App Scheduler by calling app_sched_event_put(NULL, 0, dataSamplingTimerHandler) every 50ms, and this dataSamplingTimerHandler reads from each sensor IC using TWI before it sends each byte of data using ble_nus_data_send(). This timer and ble-send functionality also works as expected, with no issues and we receive the data nicely.
Now that this behavior is stable, I have set up some code to receive incoming BLE commands in the nus_data_handler(), which also makes use of the App Scheduler and app_sched_event_put(), so that I can read/write to sensor registers directly from the Desktop app. My goal is to hopefully lean on the Scheduler to securely queue and manage TWI sensor-read events from the internal timer and from these asynchronous incoming BLE commands so that there is no resource conflict or anything like that.
The code I wrote (included below) works without fail when I am simply reading from a register. However, it only works some of the time when I want to write to a register. When it works, I can successfully verify the data was written by reading from the register.
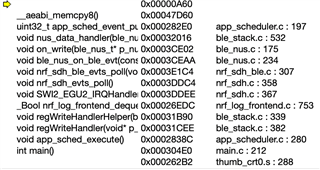
When it fails, it throws NRF ERROR INTERNAL, ERROR # 3, pretty much every single time. When only requesting a single ble-enabled register write operation, it is much more likely to avoid the error than if requesting a batch of multiple register writes. I have tried changing the I2C frequency from 400kHz to 100kHz and this doesnt help. Do you have any ideas as to why the register write operation fails only when it is triggered from the incoming BLE message? I have also included a photo of the stack when the failure occurs. Please let me know if there is anything else (other code?) that I can add to this ticket to help debug this. Many thanks in advance!
/**
* @brief Helper function to schedule RegWrite tasks
*/
void regWriteHandlerHelper(ble_nus_evt_t * p_evt)
{
uint32_t err_code;
uint16_t msg_len;
uint8_t end = 0x1;
msg_len = (p_evt)->params.rx_data.length;
uint8_t msg[msg_len];
strcpy(msg, (p_evt)->params.rx_data.p_data);
NRF_LOG_INFO("Received %d bytes of data from BLE NUS: %s", msg_len, msg);
NRF_LOG_FLUSH();
char *token;
char *delim = ",";
token = strtok(msg, delim);
/* Access the first argument in RegWrite:(addr,reg,data) */
token = strtok(NULL, delim);
int address = (int)strtol(token, NULL, 16);
NRF_LOG_INFO("RegWrite Address: 0x%X\n", address);
/* Access the second argument in RegWrite:(addr,reg,data) */
token = strtok(NULL, delim);
int reg = (int)strtol(token, NULL, 16);
NRF_LOG_INFO("RegWrite Register: 0x%X\n", reg);
/* Access the third argument in RegWrite:(addr,reg,data) */
token = strtok(NULL, delim);
int d = (int)strtol(token, NULL, 16);
NRF_LOG_INFO("RegWrite Data: 0x%X\n", d);
const uint8_t dd[] = { (uint8_t) d};
if (address == (uint8_t) IQS572_ADDR) {
uint8_t buf[1];
uint16_t regs = (uint16_t) reg;
uint8_t addrs = (uint8_t) address;
twiRegRead16(addrs, regs, buf, 1); // NOTE: Dummy Read for expected NACK due to forced comms
err_code = twiRegWrite16(addrs, regs, dd, 1);
} else {
uint8_t add = (uint8_t) address;
uint8_t rgstr = (uint8_t) reg;
err_code = twiRegWrite(add, rgstr, dd, 1);
}
APP_ERROR_CHECK(err_code);
// End Communication window
err_code = twiRegWrite16(IQS572_ADDR, IQS572_END_COMMS_WINDOW, &end, 1);
APP_ERROR_CHECK(err_code);
}
/**
* @brief Function to handle incoming BLE requests to write data to a register of a sensor IC
*/
void regWriteHandler(void * p_evt, uint16_t size)
{
regWriteHandlerHelper((ble_nus_evt_t *)p_evt);
}
/**
* @brief Function to handle incoming BLE requests to retreive sensor IC configuration data
*/
static void readConfigsHandler(void)
{
/* Send all config data <c,config_data_bytes> */
uint32_t err_code;
uint8_t dataPacket[BLE_CHARACTERISTIC_MAX_LENGTH];
uint8_t dataIndex = 0;
uint8_t id = 'c';
memcpy(dataPacket + dataIndex, &id, 1);
dataIndex = dataIndex + 1;
uint8_t sensitivity_configs[43] = {0};
// 2 Bytes for ATI Trackpad Target Value
// 1 Byte for Global ATI C value
// 40 Bytes for individual channel ATI adjustment values
capTouchSensitivityConfigs(sensitivity_configs);
memcpy(dataPacket + dataIndex, sensitivity_configs, 43);
dataIndex = dataIndex + 43;
err_code = nus_data_send(dataPacket, dataIndex);
if ((err_code != NRF_ERROR_INVALID_STATE) &&
(err_code != NRF_ERROR_RESOURCES) &&
(err_code != NRF_ERROR_NOT_FOUND))
{
APP_ERROR_CHECK(err_code);
}
}
/**@brief Function for handling the data from the Nordic UART Service.
*
* @details This function will process the data received from the Nordic UART BLE Service and send
* it to the UART module.
*
* @param[in] p_evt Nordic UART Service event.
*/
/**@snippet [Handling the data received over BLE] */
static void nus_data_handler(ble_nus_evt_t * p_evt)
{
if (p_evt->type == BLE_NUS_EVT_RX_DATA)
{
uint32_t err_code;
uint16_t msg_len;
msg_len = p_evt->params.rx_data.length;
uint8_t msg[msg_len];
strcpy(msg, p_evt->params.rx_data.p_data);
NRF_LOG_INFO("Received %d bytes of data from BLE NUS: %s", msg_len, msg);
NRF_LOG_FLUSH();
if(strstr(msg, "RegWrite"))
{
app_sched_event_put(p_evt, sizeof(ble_nus_evt_t), regWriteHandler);
}
else if(strstr(msg, "ReadConfigs"))
{
app_sched_event_put(NULL, 0, (app_sched_event_handler_t)readConfigsHandler);
}
NRF_LOG_FLUSH();
}
}
/**@brief Function for application main entry.
*/
int main(void)
{
bool erase_bonds;
/* Initialize all modules */
log_init();
/* Initialize the async SVCI interface to bootloader before any interrupts are enabled. */
APP_ERROR_CHECK(ble_dfu_buttonless_async_svci_init());
timers_init();
scheduler_init();
power_management_init();
bleInit();
twiInit(PIN_I2C_SDA, PIN_I2C_SCL);
//gpio_init();
batteryInit();
dataSamplingInit();
capacitiveTouchInit();
imuInit(IMU_SECONDARY);
ptInit(LPS22HB_PRIM_ADDR);
erase_bonds = false;
/* Start advertising device via BLE */
advertising_start(erase_bonds);
NRF_LOG_INFO("Entering main loop ...");
NRF_LOG_FLUSH();
/* Enter main loop. */
for(;;)
{
app_sched_execute(); // Execute any scheduled events.
if(NRF_LOG_PROCESS() == false)
{
nrf_pwr_mgmt_run();
}
}
}