
Hi,
Zephyr 3.0 , nrf5340 ncs 1.9.1
i can successfully sent data with
this function ;
int adxl362ext_get_fifo_data(const struct device *dev,uint8_t *read_buf, uint16_t count,struct k_poll_signal *signal_)
{
const struct adxl362ext_config *cfg = dev->config;
int err;
uint8_t access[1] = { ADXL362EXT_READ_FIFO};
const struct spi_buf buf[2] = {
{
.buf = access,
.len = 1
},
{
.buf = read_buf,
.len = count
}
};
struct spi_buf_set tx = {
.buffers = buf,
.count = 1
};
const struct spi_buf_set rx = {
.buffers = buf,
.count = 2
};
err = spi_transceive_dt(&cfg->bus,&tx, &rx);
//err = spi_transceive_async_dt(&cfg->bus,&tx, &rx,signal_);
return err;
}So it sends 2 transactions without changing cs state.
1byte tx+rx , and remaining rx bytes at the second transaction.. all works as expected.
but if i try async transceive function with these the same buffers / buffersets , i got kpoll event signal result as -5 error ...
update: i could get 0 (success) but again it only sends the first buffers in the buffer set .
if count is 1 in the buffer set , it works, but if count is 2 only the first parts fires.
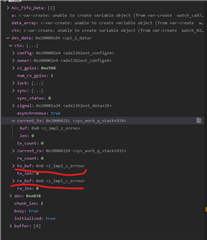
this is the debugger watch after the first chunk transferred. so this is the second chunk and it says 0 for rx and tx buffers.
if i use synchronous spi these chunks points the initial buffer address...
static inline int spi_transceive_async_dt(const struct spi_dt_spec *spec,
const struct spi_buf_set *tx_bufs,
const struct spi_buf_set *rx_bufs,struct k_poll_signal *signal_)
{
return spi_transceive_async(spec->bus, &spec->config, tx_bufs, rx_bufs,signal_);
}i tested with symmetric buffers, and it worked!
one more finding , may be this helps to find out the issue ;
void spi_context_update_rx(struct spi_context *ctx, uint8_t dfs, uint32_t len)
{
#ifdef CONFIG_SPI_SLAVE
if (spi_context_is_slave(ctx)) {
ctx->recv_frames += len;
}
#endif /* CONFIG_SPI_SLAVE */
if (!ctx->rx_len) {
return;
}
if(len>100){
volatile int oo;
oo=0;
}
if (len > ctx->rx_len) {
LOG_ERR("Update exceeds current buffer");
return;
}
ctx->rx_len -= len;
if (!ctx->rx_len) {
/* Current buffer is done. Get the next one to be processed. */
++ctx->current_rx;
--ctx->rx_count;
ctx->rx_buf = (uint8_t *)
spi_context_get_next_buf(&ctx->current_rx,
&ctx->rx_count,
&ctx->rx_len, dfs);
} else if (ctx->rx_buf) {
ctx->rx_buf += dfs * len;
}
LOG_DBG("rx buf/len %p/%zu", ctx->rx_buf, ctx->rx_len);
}i have added this code to make a breakpoint for debugger in spi_context_update_rx(struct spi_context *ctx, uint8_t dfs, uint32_t len) function( as you can see above. line 13)
if(len>100){
volatile int oo;
oo=0;
}I set my second buffer length as 256
uint8_t access[1] = { ADXL362EXT_READ_FIFO};
const struct spi_buf buf[2] = {
{
.buf = access,
.len = 1
},
{
.buf = read_buf,
.len = 256
}
};
struct spi_buf_set tx = {
.buffers = buf,
.count = 1
};
const struct spi_buf_set rx = {
.buffers = buf,
.count = 2
};
#if(CONFIG_SPI_ASYNC)
err = spi_transceive_async_dt(&cfg->bus,&tx, &rx,signal_);
#elseIf i transfer these buffers with this function ;
spi_transceive_async_dt(&cfg->bus,&tx, &rx,signal_);
debugger will never stop at len>100 condition;
if i transfer the same buffer with
err = spi_transceive_dt(&cfg->bus,&tx, &rx);
debugger stops at break point and , i can see len is 256...
So i check the documentation i couldn't find any information about this issue.
How can we use asymmetric buffer/sets with asynchronous spi api ?
Thanks.

