I am using nRF52 DK and LIS3DH accelerometer.
LIS3DH configuration is as follows:
1. LIS3DH ODR set at 10Hz,
2. Low Power Mode (Low resolution),
3. Acceleration: 2g.
4. FIFO mode Enable, and operating in FIFO mode.
I am reading all 32 samples stored in the FIFO buffer using I2C read when OVRN is set.
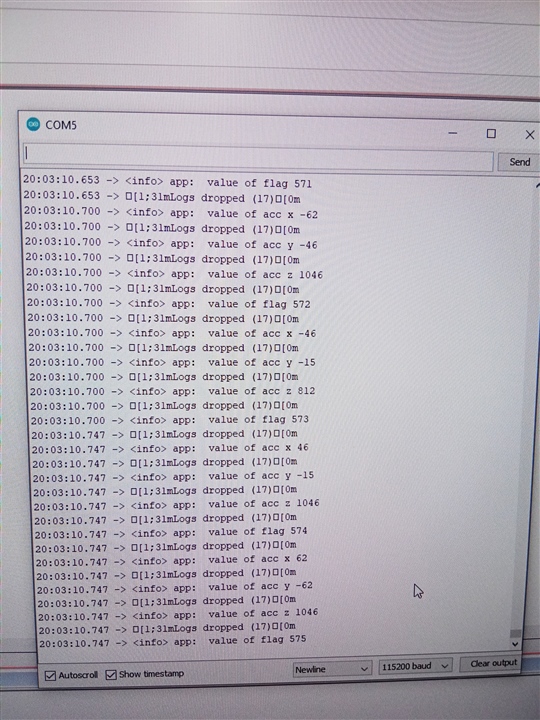
This cycle is repeated 20 times (total of 32x20=640 samples) with a multishot timer running at 3s intervals. All these samples are stored in an array of size 640. I am not getting the data properly on the serial monitor i.e., sometimes it is saying logs dropped and sometimes data is not coming. Is there any problem with FIFO configuration or FIFO data read using nRF52?
Below attached is the serial monitor image (logs dropped) printed using NRF LOG INFO, and the code:
//A. Main Function:
static void motion_sensor_timer_handler(void *p_context)
{
float LIS3DH_Acc[96]; // Array to store (32samples containing x, y and z data i.e., total 96 elements )
nrf_gpio_pin_set(ACC_VDD);
nrf_gpio_pin_set(ACC_SDO);
twi_init();
LIS3DH_Init(); //LIS3DH Sensor Init
LIS3DH_GetAccData(LIS3DH_Acc);
int16_t lis_data[96] = {0};
for(int i=0; i<96; i+=3){
lis_data[i] =(int16_t)( LIS3DH_Acc[i]);
lis_data[i+1] =(int16_t)( LIS3DH_Acc[i+1]);
lis_data[i+2] =(int16_t)( LIS3DH_Acc[i+2]);
NRF_LOG_INFO(" value of acc x %d ",lis_data[i]);
NRF_LOG_INFO(" value of acc y %d ", lis_data[i+1]);
NRF_LOG_INFO(" value of acc z %d ",lis_data[i+2]);
Motion_data[flag].x_msb= (uint8_t)((lis_data[i] & 0xFF00)>>8); // Motion_data[640]: an array to store 20 sets of 32 samples.
Motion_data[flag].x_lsb= (int8_t)(lis_data[i] & 0xFF);
Motion_data[flag].y_msb= (int8_t)((lis_data[i+1] & 0xFF00)>>8);
Motion_data[flag].y_lsb= (int8_t)(lis_data[i+1] & 0xFF);
Motion_data[flag].z_msb= (int8_t)((lis_data[i+2] & 0xFF00)>>8);
Motion_data[flag].z_lsb= (int8_t)(lis_data[i+2] & 0xFF);
NRF_LOG_INFO(" value of flag %d ",flag);
++flag;
}
nrf_drv_twi_disable(&m_twi); // disable twi
nrf_drv_twi_uninit(&m_twi);
if(flag == 640) //collect 640 readings
{
flag=0;
app_timer_stop(motion_sensor_timer_id); //stop the repeated timer T1
ret_code_t error_code;
error_code = app_timer_start(m_battery_timer_id, //begin collecting battery data T2
BATTERY_DATA_UPDATE,
NULL);
APP_ERROR_CHECK(error_code);
nrf_gpio_pin_clear(ACC_VDD);
nrf_gpio_pin_clear(ACC_SDO);
}
}
// structre definition
typedef struct
{
uint8_t x_msb;
uint8_t x_lsb;
uint8_t y_msb;
uint8_t y_lsb;
uint8_t z_msb;
uint8_t z_lsb;
}motion_data;
motion_data Motion_data[640]; // structure to hold Lis3dh data
uint8_t*acc_ptr;
//LIS3DH
//Configuration setup
void LIS3DH_Init(void)
{
uint8_t chipid = 0;
uint8_t tmp = 0;
uint8_t FIFO_Enable = 0x40;
for(int i=0; i<30000; i++){__ASM("nop");}
//read chip id
for (int i = 0; i < 10 ; i++ )
{
for(int j = 0 ; j < 1000 ; j++ ) {__asm("NOP");}
i2c_read(LIS3DH_I2C_ADDRESS ,LIS3DH_REGISTER_WHO_AM_I, &chipid, 0x01);
if ( chipid == 0x33 ) {
break;
}
}
//reboot sensor
tmp = (LIS3DH_CTRL_REG5_REBOOT);
i2c_write(LIS3DH_I2C_ADDRESS ,LIS3DH_REGISTER_CTRL_REG5, &tmp, 0x01);
//delay some time
for(int i=0; i<30000; i++){__ASM("nop");}
for(int i=0; i<30000; i++){__ASM("nop");}
for(int i=0; i<30000; i++){__ASM("nop");}
for(int i=0; i<30000; i++){__ASM("nop");}
for(int i=0; i<30000; i++){__ASM("nop");}
//report rate = 10Hz, x/y/z axis enable
tmp = (LIS3DH_CTRL_REG1_DATARATE_10HZ | LIS3DH_CTRL_REG1_XYZEN | LIS3DH_CTRL_REG1_LPEN);
i2c_write(LIS3DH_I2C_ADDRESS ,LIS3DH_REGISTER_CTRL_REG1, &tmp, 0x01);
//delay some time
for(int i=0; i<30000; i++){__ASM("nop");}
for(int i=0; i<30000; i++){__ASM("nop");}
for(int i=0; i<30000; i++){__ASM("nop");}
for(int i=0; i<30000; i++){__ASM("nop");}
//enable block data update, full-scale = +-2g
tmp = (LIS3DH_CTRL_REG4_BLOCKDATAUPDATE | LIS3DH_CTRL_REG4_SCALE_2G);
i2c_write(LIS3DH_I2C_ADDRESS ,LIS3DH_REGISTER_CTRL_REG4, &tmp, 0x01);
//FIFO Enable
i2c_write(LIS3DH_I2C_ADDRESS ,LIS3DH_REGISTER_CTRL_REG5, &FIFO_Enable, 0x01); // Enable FIFO Buffer
}
//B.2 LIS3DH data
void LIS3DH_GetAccData(float *acc)
{
uint8_t tmp[6] = {0};
int16_t tmp_int16[96] = {0};
uint8_t Wait_WTM = 0;
uint8_t enable_bypass = 0x00;
uint8_t FIFO_Mode_Enable = 0x5F;
i2c_write(LIS3DH_I2C_ADDRESS ,LIS3DH_REGISTER_FIFO_CTRL_REG, &FIFO_Mode_Enable, 0x01); // Enable FIFO Mode
while(!((Wait_WTM == 0xDF)|(Wait_WTM ==0x9F))){
i2c_read(LIS3DH_I2C_ADDRESS ,(LIS3DH_REGISTER_FIFO_SRC_REG), &Wait_WTM, 0x01); // Wait for WTM/OVRN
NRF_LOG_INFO("WTM Status: %x", Wait_WTM);
}
NRF_LOG_INFO("Getting inside loop");
for(int i=0; i<96; i+=3){
i2c_read(LIS3DH_I2C_ADDRESS ,(LIS3DH_REGISTER_OUT_X_L | LIS3DH_READ_MULTI_BYTES), tmp, 0x06);
tmp_int16[i] = (int16_t)((tmp[1]<< 8) | tmp[0]);
tmp_int16[i+1] = (int16_t)((tmp[3]<< 8) | tmp[2]);
tmp_int16[i+2] = (int16_t)((tmp[5]<< 8) | tmp[4]);
acc_working_condition=1;
acc[i] = (float)(tmp_int16[i]) * LIS3DH_ACC_CONVERT_2G;
acc[i+1] = (float)(tmp_int16[i+1]) * LIS3DH_ACC_CONVERT_2G;
acc[i+2] = (float)(tmp_int16[i+2]) * LIS3DH_ACC_CONVERT_2G;}
i2c_write(LIS3DH_I2C_ADDRESS ,LIS3DH_REGISTER_FIFO_CTRL_REG, &enable_bypass, 0x01); //Enable Bypass Mode
}
