Additional details:
- IDE: Keil uVision 5.17.00
- C Compiler: V5.06 update 1 (build 61)
- Assembler: V5.06 update 1 (build 61)
- Custom board (This shouldn't make a difference)
- SoftDevice: s140_nrf52_6.1.0
- SDK: 15.2
Hello.
I am attempting to read the link register LR the same way that the PSP and MSP are read in all Nordic example projects. See __get_PSP() and __get_MSP() for reference. I have implemented the following to mimic __get_MSP():
__STATIC_INLINE uint32_t __get_LR(void)
{
register uint32_t __regLR __ASM("lr");
return(__regLR);
}
void MemoryManagement_Handler(void)
{
static volatile uint32_t lr;
lr = __get_LR();
if(lr & 0x4)
{
// Do something useful
}
else
{
// Do something useful
}
}
// Trigger a MemManage fault from main;
main(void)
{
typedef void (*fn_t)();
fn_t func = (fn_t)((char*) 0xFFFFFFFF);
func();
}
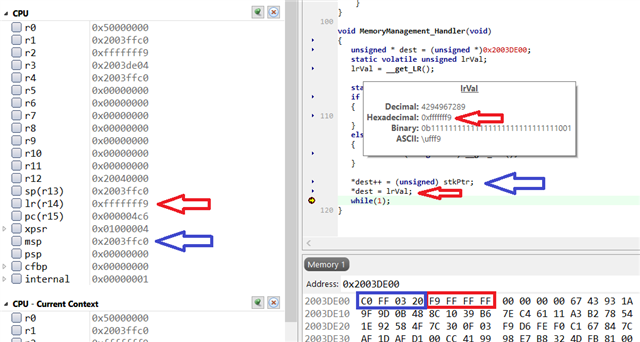
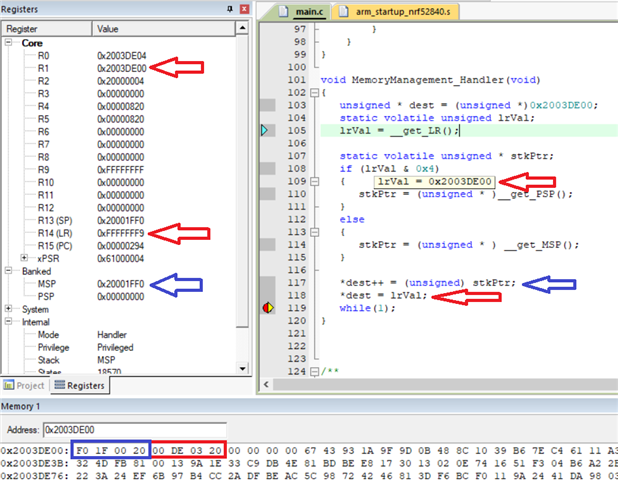
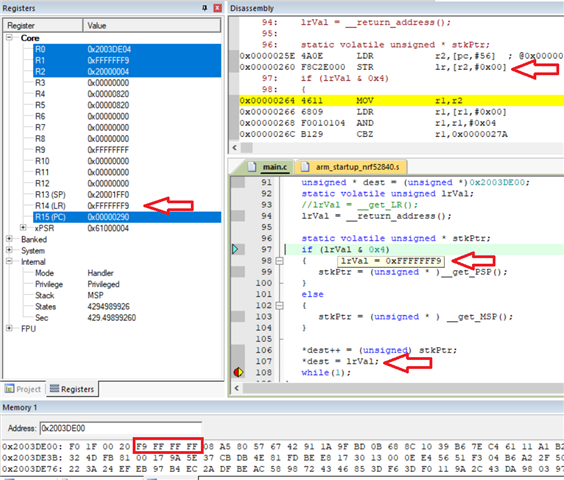
However, the link register value returned does not match what is shown in the Keil uVision registers window as seen below.
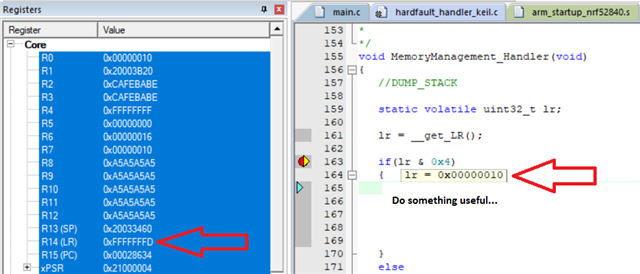
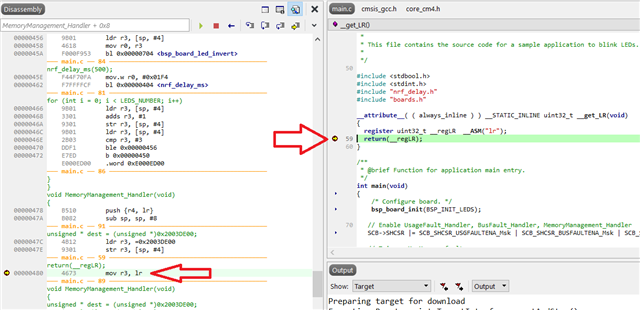
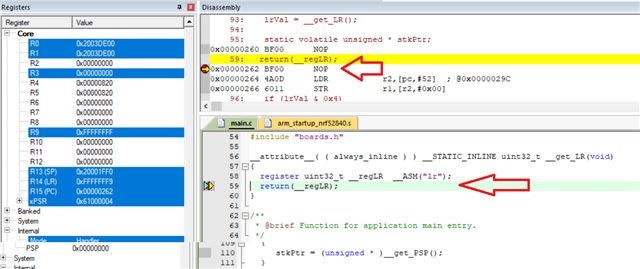
Note that I have no trouble reading the PSP or MSP. But for some reason I cannot read the link register,. Replacing __ASM("lr") with __ASM("r14") resulted in the same behavior. Oddly enough, when I hover my mouse over __ASM("lr"), it shows the correct value as seen in the register window. Lastly, looking at the HardFault_Handler() implementation in the Nordic examples as found in hardfault_handler_keil.c, it looks like the link register LR is checked using "tst lr, #4".
Any idea as to why I cannot read the link register using ASM("lr")? The same code works on a STM MCU in Keil uVision, but Nordic does not work.
Thanks!
Derek