Hello
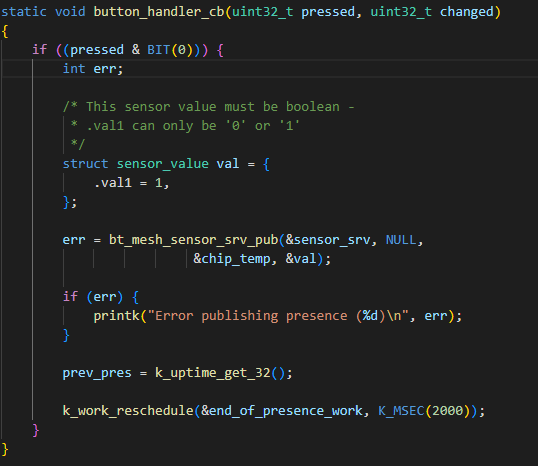
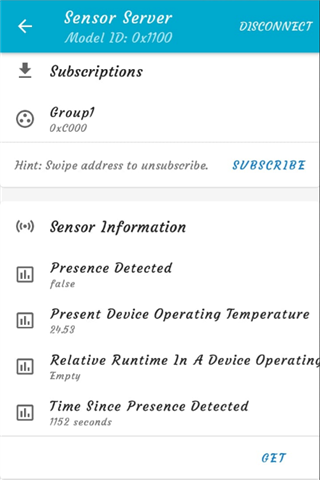
I tried bluetooth mesh sensor server and client example, everything is good including provisioning process in mobile but the output is different with different mobiles. i have 2 mobiles where i tested in both mobiles i get output of this part as shown in picture-1
picture-1
and
picture-2
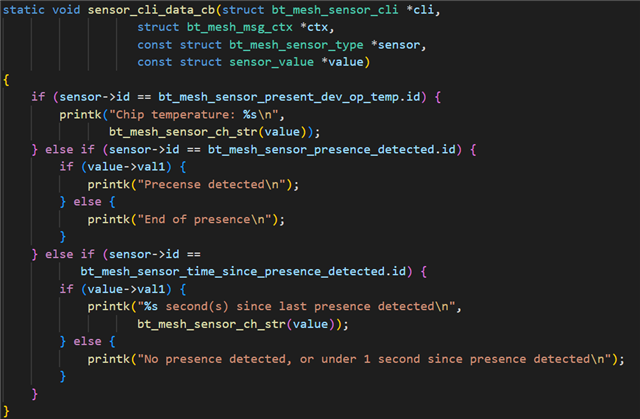
and from the picture-2 of code except chip temperature i can see other printk functions in output.
I tried this in my colleague mobile in that i can see picture-2 outputs but not picture-1 output.
I am really confused, why this happens? Can anyone help me as soon as possible please...
Regards
SaSu



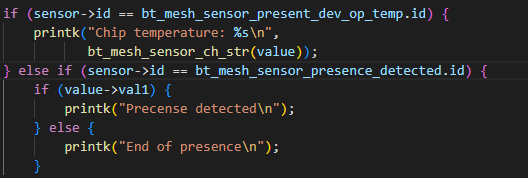 this part is not triggering because bt_mesh_sensor_present_dev_op_temp.id and bt_mesh_sensor_presence_detected.id id's are different.
this part is not triggering because bt_mesh_sensor_present_dev_op_temp.id and bt_mesh_sensor_presence_detected.id id's are different.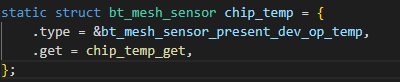
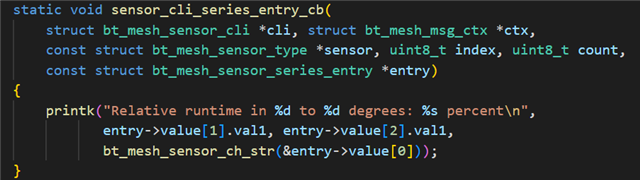
 here it receives. as you can see we use sensor types and as far as i figured that is main function to send and receive messages .
here it receives. as you can see we use sensor types and as far as i figured that is main function to send and receive messages .