Hello
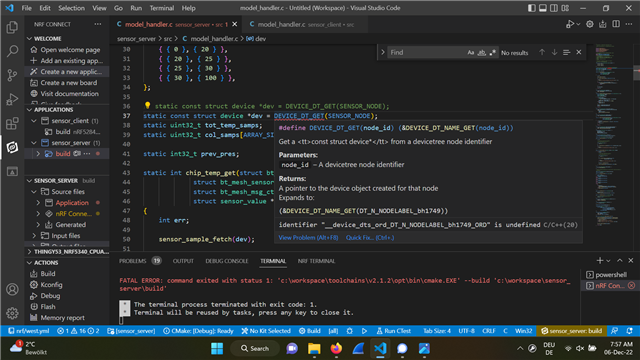
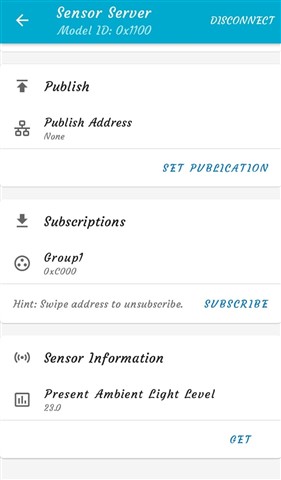
I was trying to add BH1749 I2C Sensor for existing Mesh_Sensor example to get RGB values like shown in this Light_Sensor example. Couldn't decide how to do it and which Sensor_Types (FYI: I used bt_mesh_sensor_present_amb_light_level) and which Sensor_Channels (FYI: I used SENSOR_CHAN_RED, SENSOR_CHAN_GREEN, SENSOR_CHAN_BLUE) or it really possible? The Things i used so far is unfortunatley not success need a help in this.
Thank You
Regards