Hello,
Instead of using the bitbang-i2c driver, i would like to use the i2c0-interface with two different i2c-busses/ pin-pairs.
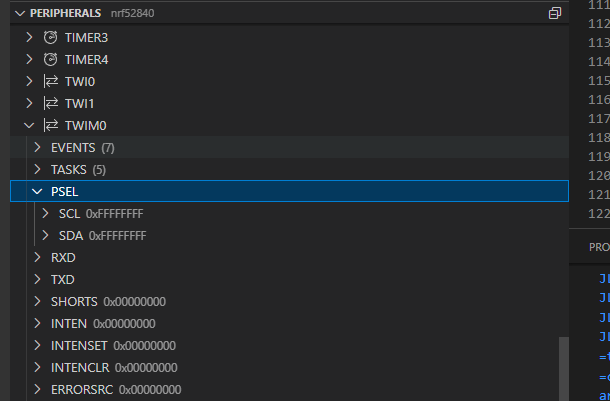
I already tried to reconfigure the pins with the pinctrl_update_states() function, but I didn't get it to work as i wanted.
This is my overlay file: The pressure-sensor is connected to pin 24+25
&i2c0 {
label = "i2c0";
status = "okay";
lsm6dso@6a {
compatible = "st,lsm6dso";
reg = <0x6a >;
accel-pm = <0>;
accel-odr = <0>;
accel-range = <0>;
gyro-odr = <3>;
gyro-pm = <0>;
gyro-range = < 6 >;
label = "LSM6DSO";
//supply-gpios = < &gpio0 16 GPIO_ACTIVE_HIGH >;
vin-supply = < &imu_pwr >;
//int-pin = < 0 >; Für das Prototypen board
};
ms5607@76 {
compatible = "meas,ms5607";
reg = <0x76>;
label = "MS5607";
//supply-gpios = < &gpio0 20 GPIO_ACTIVE_HIGH >;
vin-supply = < &pressure_pwr >;
};
};
&pinctrl {
...
/* Alternative pin configuration for i2c interface */
i2c0_alt_default: i2c0_alt_default {
group1 {
psels = <NRF_PSEL(TWIM_SDA, 0, 24)>,
<NRF_PSEL(TWIM_SCL, 0, 25)>;
};
};
i2c0_alt_sleep:i2c0_alt_sleep {
group1 {
psels = <NRF_PSEL(TWIM_SDA, 0, 24)>,
<NRF_PSEL(TWIM_SCL, 0, 25)>;
low-power-enable;
};
};
};then i defined the new pincontrol configurations:
PINCTRL_DT_STATE_PINS_DEFINE(DT_PATH(zephyr_user), i2c0_alt_default);
PINCTRL_DT_STATE_PINS_DEFINE(DT_PATH(zephyr_user), i2c0_default);
#ifdef CONFIG_PM_DEVICE
PINCTRL_DT_STATE_PINS_DEFINE(DT_PATH(zephyr_user), i2c0_alt_sleep);
PINCTRL_DT_STATE_PINS_DEFINE(DT_PATH(zephyr_user), i2c0_sleep);
#endif
PINCTRL_DT_DEV_CONFIG_DECLARE(DT_NODELABEL(i2c0));
struct pinctrl_dev_config *i2c0_config = PINCTRL_DT_DEV_CONFIG_GET(DT_NODELABEL(i2c0));
static const struct pinctrl_state i2c_alt[] = {
PINCTRL_DT_STATE_INIT(i2c0_alt_default, PINCTRL_STATE_DEFAULT),
#ifdef CONFIG_PM_DEVICE
PINCTRL_DT_STATE_INIT(i2c0_alt_sleep, PINCTRL_STATE_SLEEP),
#endif
};
static const struct pinctrl_state i2c_default[] = {
PINCTRL_DT_STATE_INIT(i2c0_default, PINCTRL_STATE_DEFAULT),
#ifdef CONFIG_PM_DEVICE
PINCTRL_DT_STATE_INIT(i2c0_sleep, PINCTRL_STATE_SLEEP),
#endif
};
static int remap_pins_imu()
{
return pinctrl_update_states(i2c0_config, i2c_default, ARRAY_SIZE(i2c_default));
}
static int remap_pins_pressure()
{
return pinctrl_update_states(i2c0_config, i2c_alt, ARRAY_SIZE(i2c_alt));
}
Before I read the sensors i call the rempa_pins_x() Functions to switch the pins. This should work, because I get 0 as return value, but I think the initialization process did not work correctly. How can I do this propperly?
I use nRF Connect SDK 2.1 and an nRF52805