Dear Nordic Team,
I found a few similar issues in this forum but nothing that then solved my problem which brought me to the conclusion it might be different here.
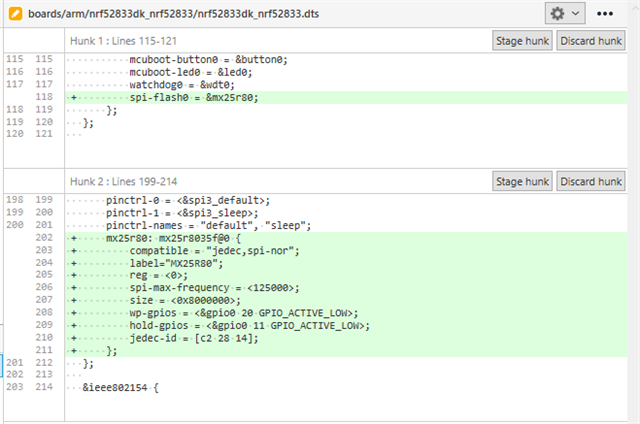
I try to add an external SPI-NOR flash (MX25R8035F) to nrf52832 project. I started with the example in zephyr/samples/drivers/spi_flash which is for nrf52840 and changed the dts file as follows:
Here I post the "arduino-spi", I also tried with SPI0 and SPI1, same behavior.
nrf52dk_nrf52832.dts:
aliases {
...
...
spi-flash0 = &mx25r80;
};
arduino_spi: &spi2 {
status = "okay";
cs-gpios = <&gpio0 20 GPIO_ACTIVE_LOW>;
pinctrl-0 = <&spi2_default>;
pinctrl-1 = <&spi2_sleep>;
pinctrl-names = "default", "sleep";
mx25r80: mx25r8035f@0 {
compatible = "jedec,spi-nor";
label="MX25R80";
reg = <0>;
spi-max-frequency = <33000000>;
size = <0x800000>;
jedec-id = [c2 28 14];
};
};
my code:
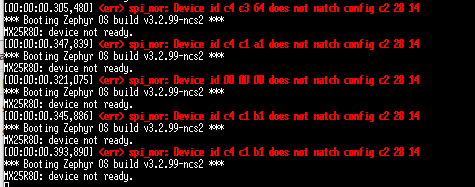
The problem:
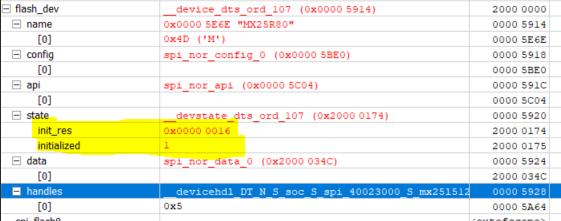
The flash device gets partly initialized since flash_dev.state.initialized == 1 and partly not since flash_dev.state.init_res==16 (should be 0). That is why device_is_ready() return false.
I see this in the debugger as below:
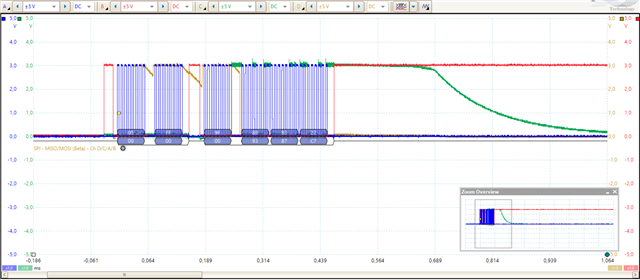
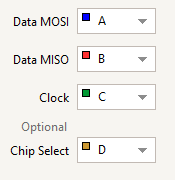
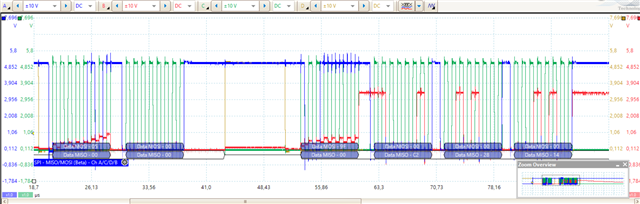
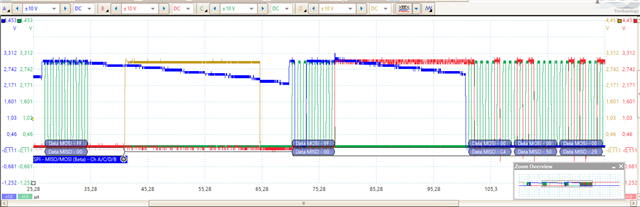
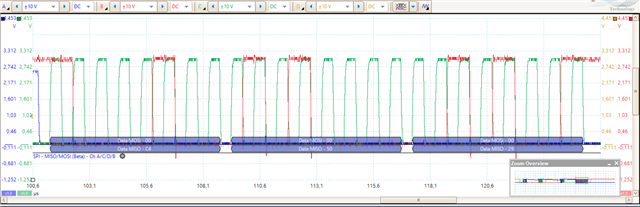
I see on my oszilloscope that SPI itself is working because I get responses from the external flash, so I can't be doing everything wrong. But the write and read process is working incorrectly, meaning that if I write something to a location, I get a wrong response when reading again.
Do you have any ideas what the problem could be?
I also tried to research what EBUSY in the devicetree means in general and found that it often has to do with wrong pins. However, this can't be the case here, since my SPI is working, do you agree?
Thank you very much in advance,
Joanna