I'm using Seeed XIAO nrf52840 and tried matter cluster as below.
I'm using master branch on Matter SDK.
https://github.com/project-chip/connectedhomeip/tree/master/examples/lighting-app/nrfconnect
I modified `boards/nrf52840dk_nrf52840.overlay` file as below.
/ {
chosen {
nordic,pm-ext-flash = &p25q16h_spi;
};
/*
* In some default configurations within the nRF Connect SDK,
* e.g. on nRF52840, the chosen zephyr,entropy node is &cryptocell.
* This devicetree overlay ensures that default is overridden wherever it
* is set, as this application uses the RNG node for entropy exclusively.
*/
/delete-property/ arduino_header;
/delete-property/ connector;
/delete-property/ arduino_adc;
/delete-property/ analog-connector;
/delete-property/ spi1;
/delete-property/ spi2;
/delete-property/ uart1;
/delete-property/ i2c0;
/delete-property/ arduino_serial;
/delete-property/ arduino_i2c;
/delete-node/ spi1;
/delete-node/ spi2;
/delete-node/ uart1;
/delete-node/ i2c0;
/delete-node/ arduino_serial;
/delete-node/ arduino_i2c;
chosen {
zephyr,entropy = &rng;
};
leds {
compatible = "gpio-leds";
led0: led_0 {
gpios = <&gpio0 17 GPIO_ACTIVE_LOW>;
label = "Green LED 0";
};
led1: led_1 {
gpios = <&gpio0 26 GPIO_ACTIVE_LOW>;
label = "Red LED 1";
};
led2: led_2 {
gpios = <&gpio0 30 GPIO_ACTIVE_LOW>;
label = "Green LED 2";
};
led3: led_3 {
gpios = <&gpio0 6 GPIO_ACTIVE_LOW>;
label = "Blue LED 3";
};
};
buttons {
compatible = "gpio-keys";
button0: button_0 {
gpios = <&gpio1 15 (GPIO_PULL_UP | GPIO_ACTIVE_LOW)>;
label = "Push button switch 0";
};
button1: button_1 {
gpios = <&gpio1 14 (GPIO_PULL_UP | GPIO_ACTIVE_LOW)>;
label = "Push button switch 1";
};
button2: button_2 {
gpios = <&gpio0 2 (GPIO_PULL_UP | GPIO_ACTIVE_LOW)>;
label = "Push button switch 2";
};
button3: button_3 {
gpios = <&gpio0 3 (GPIO_PULL_UP | GPIO_ACTIVE_LOW)>;
label = "Push button switch 3";
};
};
/*
* By default, PWM module is only configured for led0 (LED1 on the board).
* The lighting-app, however, uses LED2 to show the state of the lighting,
* including its brightness level.
*/
aliases {
pwm-led1 = &pwm_led1;
};
pwmleds {
pwm_led1: pwm_led_1 {
pwms = <&pwm0 1 PWM_MSEC(20) PWM_POLARITY_INVERTED>;
};
};
};
&pwm0 {
pinctrl-0 = <&pwm0_default_alt>;
pinctrl-1 = <&pwm0_sleep_alt>;
pinctrl-names = "default", "sleep";
};
&uart0{
/delete-property/ rts-pin;
/delete-property/ cts-pin;
/delete-property/ hw-flow-control;
};
&pinctrl {
pwm0_default_alt: pwm0_default_alt {
group1 {
psels = <NRF_PSEL(PWM_OUT1, 0, 26)>;
nordic,invert;
};
};
pwm0_sleep_alt: pwm0_sleep_alt {
group1 {
psels = <NRF_PSEL(PWM_OUT1, 0, 26)>;
low-power-enable;
};
};
uart0_default: uart0_default {
group1 {
psels = <NRF_PSEL(UART_TX, 1, 11)>,
<NRF_PSEL(UART_RX, 1, 12)>;
};
};
uart0_sleep: uart0_sleep {
group1 {
psels = <NRF_PSEL(UART_TX, 1, 11)>,
<NRF_PSEL(UART_RX, 1, 12)>;
low-power-enable;
};
};
spi3_default: spi3_default {
group1 {
psels = <NRF_PSEL(SPIM_SCK, 0, 21)>,
<NRF_PSEL(SPIM_MOSI, 0, 20)>,
<NRF_PSEL(SPIM_MISO, 0, 24)>;
};
};
spi3_sleep: spi3_sleep {
group1 {
psels = <NRF_PSEL(SPIM_SCK, 0, 21)>,
<NRF_PSEL(SPIM_MOSI, 0, 20)>,
<NRF_PSEL(SPIM_MISO, 0, 24)>;
low-power-enable;
};
};
qspi_default: qspi_default {
group1 {
psels = <NRF_PSEL(QSPI_SCK, 0, 21)>,
<NRF_PSEL(QSPI_IO0, 0, 20)>,
<NRF_PSEL(QSPI_IO1, 0, 24)>,
<NRF_PSEL(QSPI_IO2, 0, 22)>,
<NRF_PSEL(QSPI_IO3, 0, 23)>,
<NRF_PSEL(QSPI_CSN, 0, 25)>;
};
};
qspi_sleep: qspi_sleep {
group1 {
psels = <NRF_PSEL(QSPI_SCK, 0, 21)>,
<NRF_PSEL(QSPI_IO0, 0, 20)>,
<NRF_PSEL(QSPI_IO1, 0, 24)>,
<NRF_PSEL(QSPI_IO2, 0, 22)>,
<NRF_PSEL(QSPI_IO3, 0, 23)>,
<NRF_PSEL(QSPI_CSN, 0, 25)>;
low-power-enable;
};
};
};
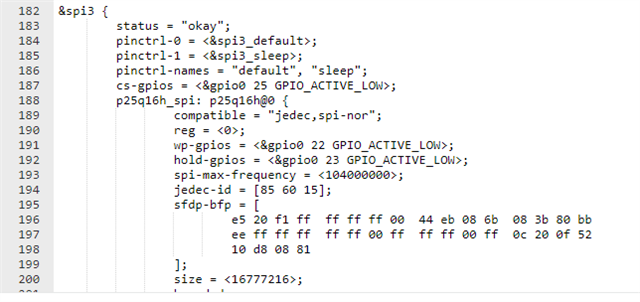
&spi3 {
status = "okay";
pinctrl-0 = <&spi3_default>;
pinctrl-1 = <&spi3_sleep>;
pinctrl-names = "default", "sleep";
cs-gpios = <&gpio0 25 GPIO_ACTIVE_LOW>;
p25q16h_spi: p25q16h@0 {
compatible = "jedec,spi-nor";
reg = <0>;
wp-gpios = <&gpio0 22 GPIO_ACTIVE_LOW>;
hold-gpios = <&gpio0 23 GPIO_ACTIVE_LOW>;
spi-max-frequency = <104000000>;
jedec-id = [85 60 15];
sfdp-bfp = [
e5 20 f1 ff ff ff ff 00 44 eb 08 6b 08 3b 80 bb
ee ff ff ff ff ff 00 ff ff ff 00 ff 0c 20 0f 52
10 d8 08 81
];
size = <16777216>;
has-dpd;
t-enter-dpd = <3000>;
t-exit-dpd = <8000>;
};
};
and I modified `configuration/nrf52840dk_nrf52840/pm_static_dfu.yml` as below.
mcuboot:
address: 0x0
size: 0x7000
region: flash_primary
mcuboot_pad:
address: 0x7000
size: 0x200
app:
address: 0x7200
size: 0xf3e00
mcuboot_primary:
orig_span: &id001
- mcuboot_pad
- app
span: *id001
address: 0x7000
size: 0xf4000
region: flash_primary
mcuboot_primary_app:
orig_span: &id002
- app
span: *id002
address: 0x7200
size: 0xf3e00
factory_data:
address: 0xfb000
size: 0x1000
region: flash_primary
settings_storage:
address: 0xfc000
size: 0x4000
region: flash_primary
mcuboot_secondary:
address: 0x0
size: 0xf4000
device: p25q16h_spi
region: external_flash
external_flash:
address: 0xf4000
size: 0x10C000
device: p25q16h_spi
region: external_flash
I built with command `west build -b nrf52840dk_nrf52840`.
Then, below error occurred.
/home/muto/gcc-arm/gcc-arm-none-eabi-10.3-2021.10/bin/../lib/gcc/arm-none-eabi/10.3.1/../../../../arm-none-eabi/bin/ld.bfd: modules/nrf/subsys/dfu/dfu_target/lib..__nrf__subsys__dfu__dfu_target.a(dfu_target_mcuboot.c.obj): in function `dfu_target_mcuboot_init': /home/muto/ncs/nrf/subsys/dfu/dfu_target/src/dfu_target_mcuboot.c:153: undefined reference to `__device_dts_ord_137' /home/muto/gcc-arm/gcc-arm-none-eabi-10.3-2021.10/bin/../lib/gcc/arm-none-eabi/10.3.1/../../../../arm-none-eabi/bin/ld.bfd: zephyr/libzephyr.a(flash_map_partition_manager.c.obj):(.rodata.default_flash_map+0x1c): undefined reference to `__device_dts_ord_137' /home/muto/gcc-arm/gcc-arm-none-eabi-10.3-2021.10/bin/../lib/gcc/arm-none-eabi/10.3.1/../../../../arm-none-eabi/bin/ld.bfd: zephyr/libzephyr.a(flash_map_partition_manager.c.obj):(.rodata.default_flash_map+0x6c): undefined reference to `__device_dts_ord_137' collect2: error: ld returned 1 exit status ninja: build stopped: subcommand failed.
how do I resolve it?